Point cloud segmentation method and device and computer storage medium
A point cloud, to-be-segmented technology, applied in computing, image analysis, image enhancement and other directions, can solve the problems of quantization error, increased calculation amount, noise and other interference robustness, etc., to reduce the amount of calculation and calculation. The effect of small and good feature learning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
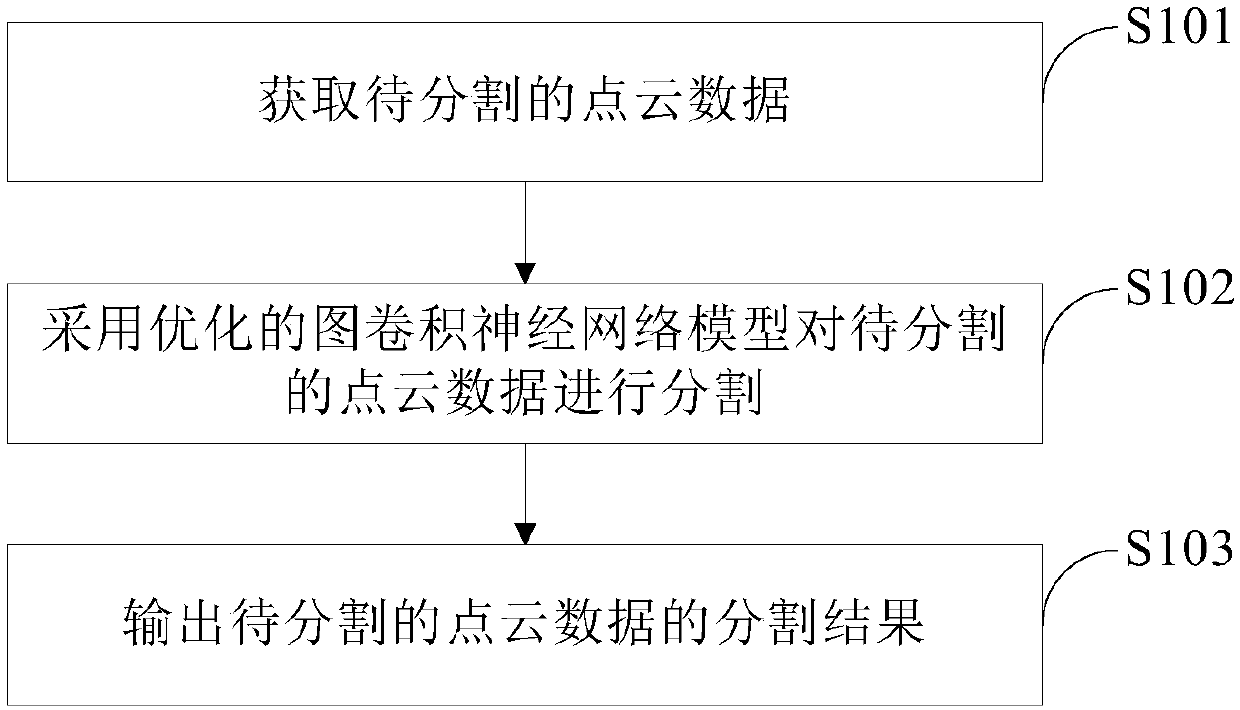
[0080] figure 1 A schematic flow chart of the point cloud segmentation method provided by Embodiment 1 of the present invention, as figure 1 As shown, the method includes:
[0081] S101. Obtain point cloud data to be segmented.
[0082] S102. Segment the point cloud data to be segmented by using an optimized graph convolutional neural network model.
[0083] S103. Output the segmentation result of the point cloud data to be segmented.
[0084] In practical applications, the execution subject of this embodiment may be a point cloud segmentation device. In practical applications, the point cloud segmentation device can be realized by a virtual device, such as software code, or by a physical device written with relevant execution codes, such as a U disk, or it can also be realized by integrating relevant execution codes. The physical device implementation of the code, for example, a chip, an intelligent robot, etc.
[0085] Example in combination with actual scenarios: take ...
Embodiment 2
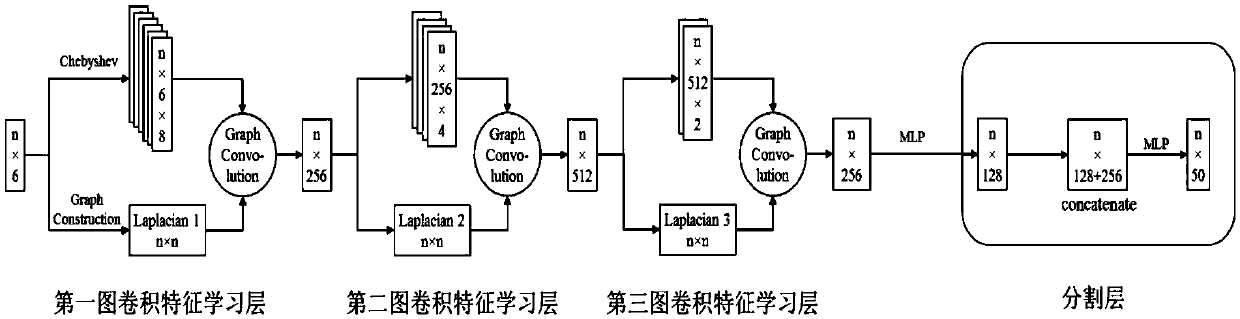
[0088] On the basis of the first embodiment above, in the point cloud segmentation method provided by the second embodiment of the present application, the optimized graph convolutional neural network model may include multiple optimized graph convolutional feature learning layers and segmentation layers, and each The algorithm of the optimized graph convolution feature learning layer is the same;
[0089] Specifically, such as figure 2 As shown, the optimized graph convolutional neural network model can include 3 optimized graph convolution feature learning layers (the first to third graph convolution feature learning layers), and the algorithms of the 3 graph convolution feature learning layers are the same , the network model also includes a segmentation layer. In practical applications, it may also include a classification layer, which is not limited in this application.
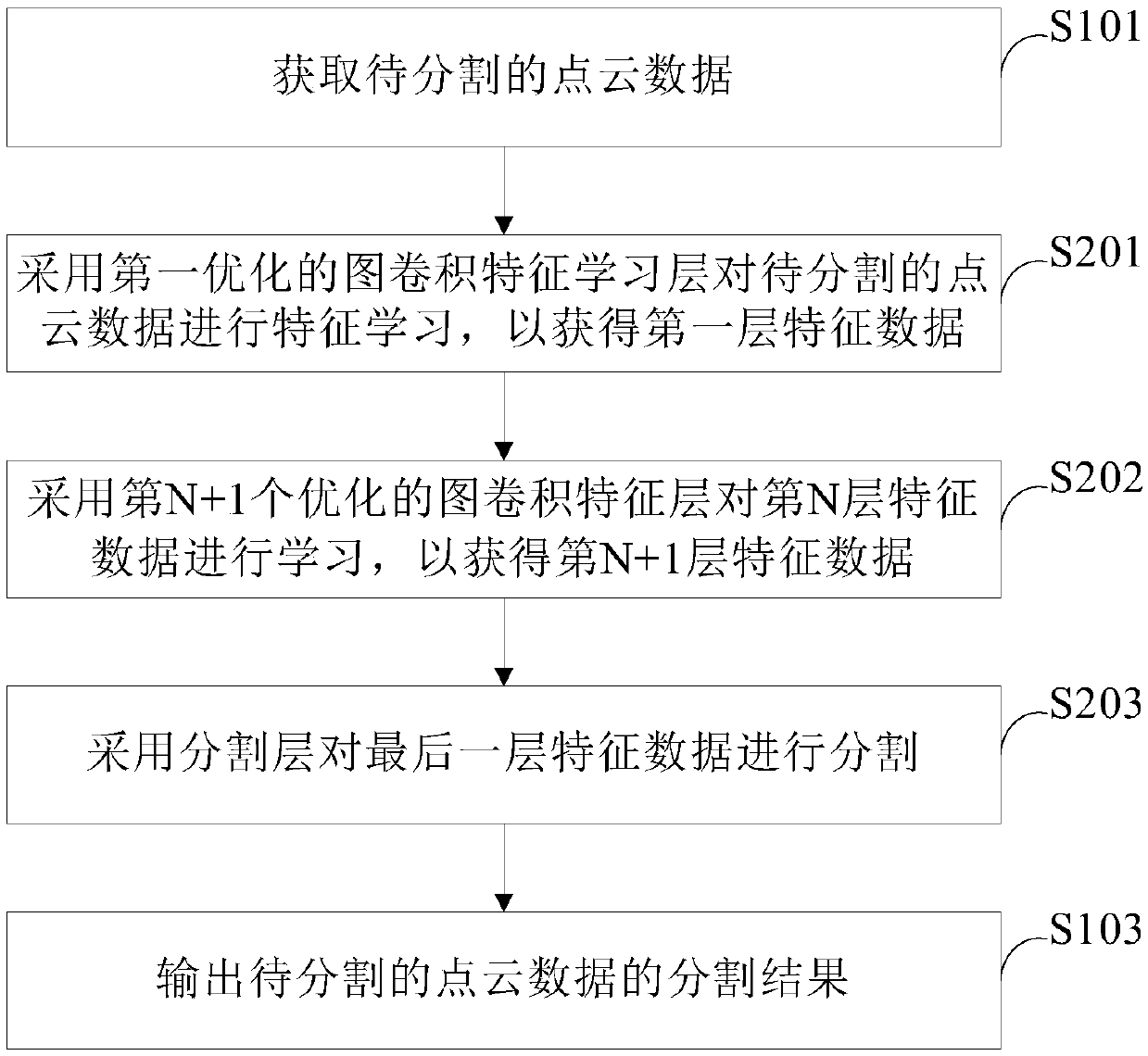
[0090] corresponding, image 3 A schematic flow chart of the point cloud segmentation method provi...
Embodiment 3
[0130] Figure 5 It is a schematic structural diagram of the point cloud segmentation device provided in Embodiment 3 of the present application. Such as Figure 5 As shown, the device includes:
[0131] An acquisition module 610, configured to acquire point cloud data to be segmented.
[0132] The segmentation module 620 is configured to segment the point cloud data to be segmented using an optimized graph convolutional neural network model.
[0133] An output module 630, configured to output the segmentation result of the point cloud data to be segmented.
[0134] For details of the above modules, see the above figure 1 The description in the corresponding examples.
[0135] The point cloud segmentation device provided in the embodiment of the present application obtains the point cloud data to be segmented, and directly inputs the optimized graph convolutional neural network model for segmentation. Since the graph convolution operation is used, the computation amount o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com