Multi-sensor space-time synchronization and traffic scheduling device and method based on vehicle-road cooperation
A vehicle-road coordination, multi-sensor technology, applied in the traffic control system of road vehicles, traffic flow detection, multiplexing communication, etc., can solve data transmission delay, incompatibility with sensing device data flow, increase night camera sensing data Effective recall rate and other issues to achieve the effect of ensuring reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0025] This embodiment provides a multi-sensor time-space synchronization and traffic scheduling method based on vehicle-road coordination, including:
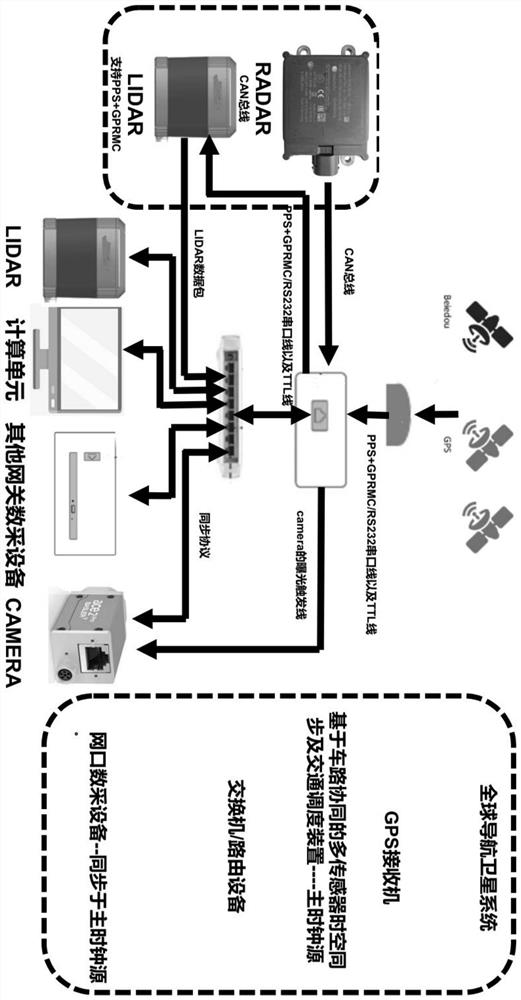
[0026] (1) Obtain the NMEA sentence and PPS signal of the GPS receiver to realize the synchronization of absolute time and frequency;
[0027] (2) By writing the physical interface baud rate information and physical link length to the register table in the ARM architecture, the data streams of the sensing devices of various interfaces that do not support the PTP algorithm firmware are stamped with timestamp information to eliminate link delays , so that the data flow is converged on the network side, and the time of the network interface perception device supporting the PTP algorithm firmware is synchronized with the hardware time register of the network physical layer under the ARM architecture, eliminating the need for perception devices or computing units with different computing capabilities to transfer network application ...
Embodiment 2
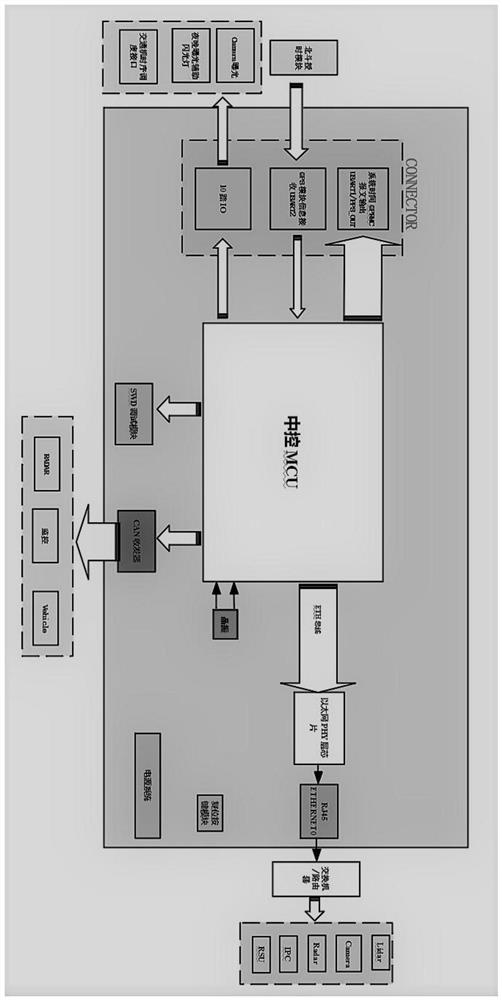
[0033] A multi-sensor space-time synchronization and traffic scheduling device based on vehicle-road coordination provided by this embodiment includes the following modules:
[0034] The space-time synchronization of the distributed system is realized in the following way: the computing chip based on the ARM architecture completes the synchronization of absolute time and clock frequency through the NMEA sentence and the PPS signal in the GPS receiver, and gathers the data flow of the participants of the perception equipment of various types of interfaces With time stamp attached, it can also realize the time synchronization of the sensing device data flow of each subsystem in the distributed system by requesting the time synchronization service of other effective synchronization subsystems under the vehicle-road coordination global area network when effective satellite information cannot be searched. Under the vehicle-road collaborative global architecture, the vehicle-road, ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com