Fuzzy active disturbance rejection control method of permanent magnet synchronous motor used for industrial robots
A permanent magnet synchronous motor, industrial robot technology, applied in the direction of motor generator control, electronic commutation motor control, control system, etc., can solve the problem of only analog and pulse control mode, poor dynamic response ability, drive motor system performance Higher requirements and other issues, to achieve the effect of improving accuracy and anti-disturbance ability, improving rapidity and stability, and strong robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0045] Now in conjunction with accompanying drawing, the present invention is described in detail as follows:
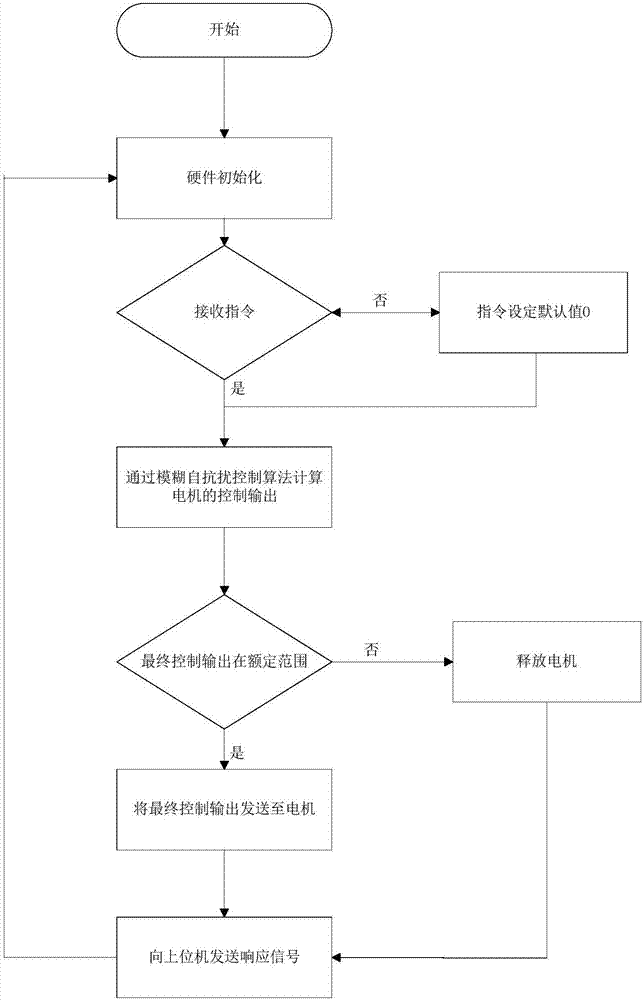
[0046] A fuzzy active disturbance rejection control system for permanent magnet synchronous motors for industrial robots, including a core controller module, a current acquisition module and a communication module. The core controller module completes the control algorithm of the drive motor, generates PWM signals to control the motor drive, the current module collects the signals of the motor drive module, and the communication module connects the core controller module with the host computer.
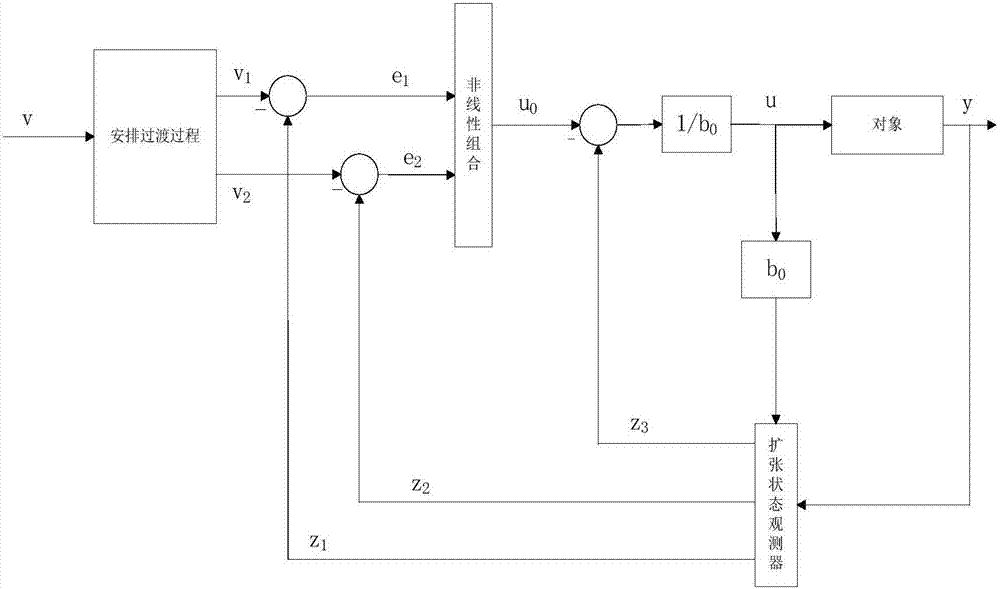
[0047] The core controller module adopts the permanent magnet synchronous motor control method based on fuzzy active disturbance rejection control, first collects the rotor position signal of the motor servo system, and then uses the rotor position signal as the feedback signal of the fuzzy active disturbance rejection controller, and uses fuzzy reasoning Rules, establish a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com