UWB-based autonomous following robot positioning method and system
A tracking robot and positioning system technology, applied in the field of autonomous tracking robot positioning system, can solve the problems of GPS signal fading, low transmission data rate, low positioning accuracy, etc., and achieve the effects of low power consumption, simple hardware implementation, and convenient operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0020] Below in conjunction with accompanying drawing the further description of the present invention.
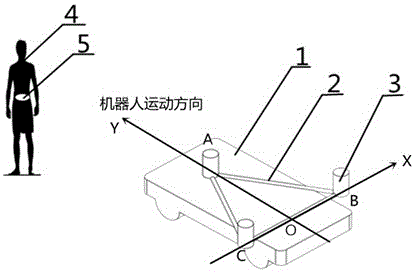
[0021] Please refer to figure 1 , a UWB-based autonomous follower robot positioning system of the present invention, UWB (UltraWideband) is a carrier-free communication technology. The system includes: a mobile robot 1, a UWB base station 3, a specific target 4, and a UWB positioning tag 5; the specific target 4 is a person or object that can move freely; there are three described UWB base stations 3; The positioning tag 5 is worn on a freely moving person or object, and is a wearable device, such as being worn on a person's wrist, around a waist or around a neck, and the like. At least three UWB base stations 3 are fixed on the mobile robot 1, an equilateral triangle 2 formed by the three UWB base stations 3, and a UWB positioning tag 5 is placed on the freely moving person or object; the UWB base station 3 sends a UWB signal ; The UWB positioning tag 5 receives the UWB...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com