Mobile robot following method and system
A mobile robot and target technology, which is applied in the field of mobile robot following methods and systems, can solve problems such as cumbersome determination of following targets, and achieve the effect of improving the convenience of operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] Preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings, wherein the accompanying drawings constitute a part of the application and together with the embodiments of the present invention are used to explain the principle of the present invention and are not intended to limit the scope of the present invention.
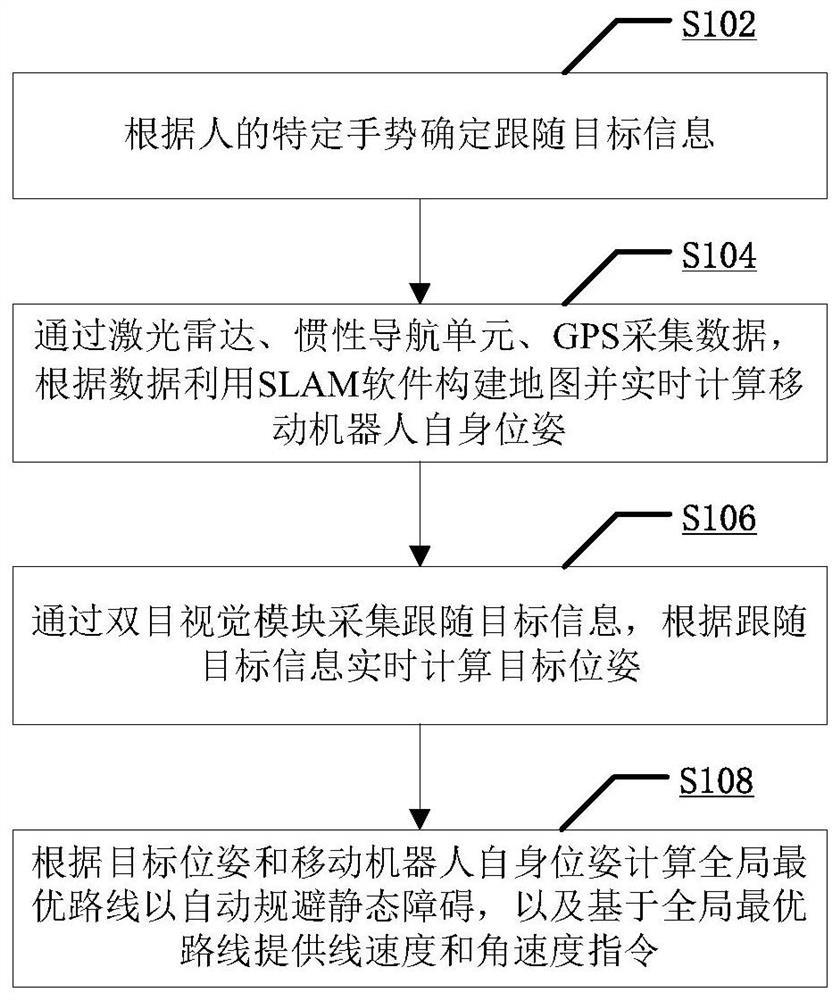
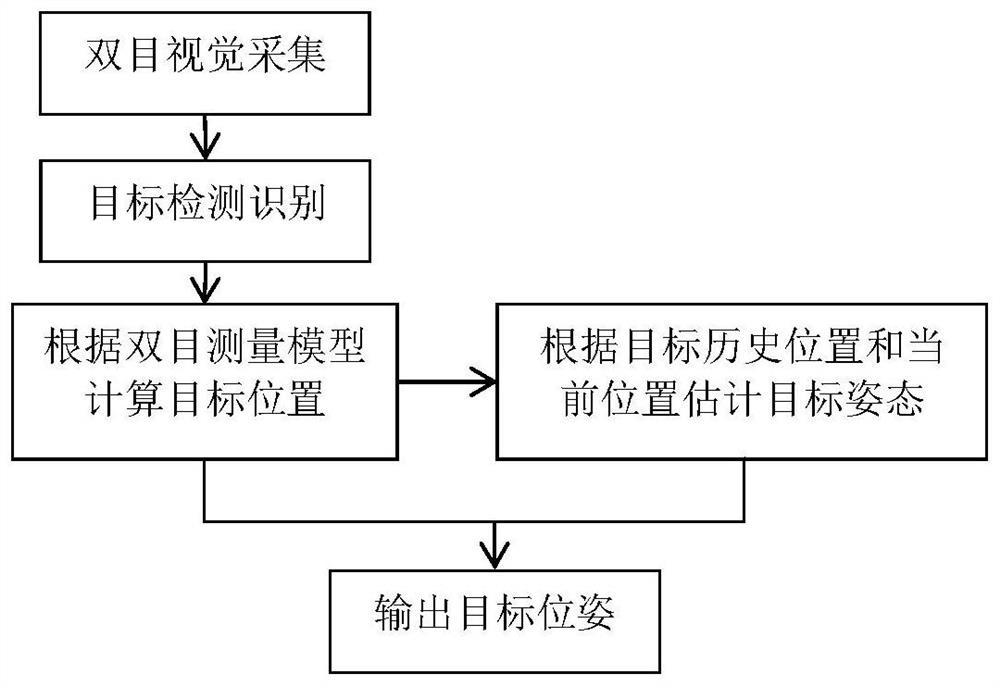
[0034] A specific embodiment of the present invention discloses a mobile robot following method, such as figure 1 shown. The mobile robot following method includes: step S102, determining following target information according to the specific gesture of the person; step S104, collecting data through laser radar, inertial navigation unit, and GPS, constructing a map using SLAM software according to the data, and calculating the pose of the mobile robot in real time; Step S106, collect following target information through the binocular vision module, and calculate the target pose in real time a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com