Bearing-free asynchronous motor control method based on neural network inverse system theory
A neural network inverse and asynchronous motor technology, applied in the field of bearingless asynchronous motor control, can solve problems such as the difficulty of accurate modeling of the system and the difficulty of applying the analytical inverse system method, so as to overcome interference, realize high-performance control, and suppress parameter input. moving effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
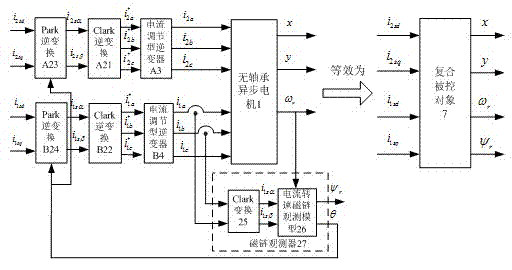
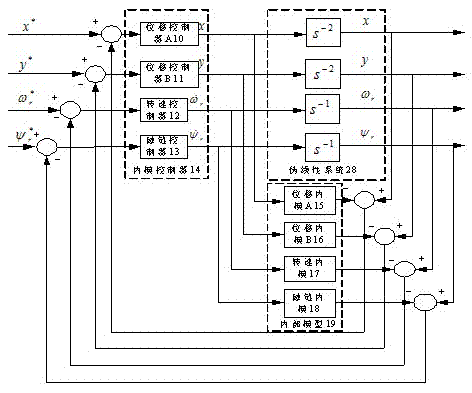
[0025] In the present invention, firstly, the bearingless asynchronous motor 1, two current-regulated inverters 3, 4, two sets of Park inverse transforms 23, 24, two sets of Clark inverse transforms 21, 22, and flux linkage observer 27 are combined as a whole The controlled object 7, the composite controlled object is equivalent to a sixth-order differential equation model in the rotor field-oriented coordinate system, and the relative order of the vector of the system is {2,2,1,1}. A fuzzy neural network with 10 input nodes and 4 output nodes plus 6 integrators ( ) to construct the neural network inverse system 9 of the compound controlled object. And by training the fuzzy neural network 8, the neural network inverse system 9 realizes the inverse system function of the compound controlled object 7. Then the neural network inverse system 9 is connected in series before the composite controlled object 7, and the neural network inverse system 9 and the composite controlled obj...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com