Topological map-based cutting track planning method for cantilever type heading machine
A cantilever roadheader and trajectory planning technology, which is applied in the fields of earthwork drilling, calculation model, prediction, etc., can solve the problems of constant cutting trajectory, low cutting efficiency, and inability to autonomously perceive the environment of the roadway section. effect of planning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0056] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
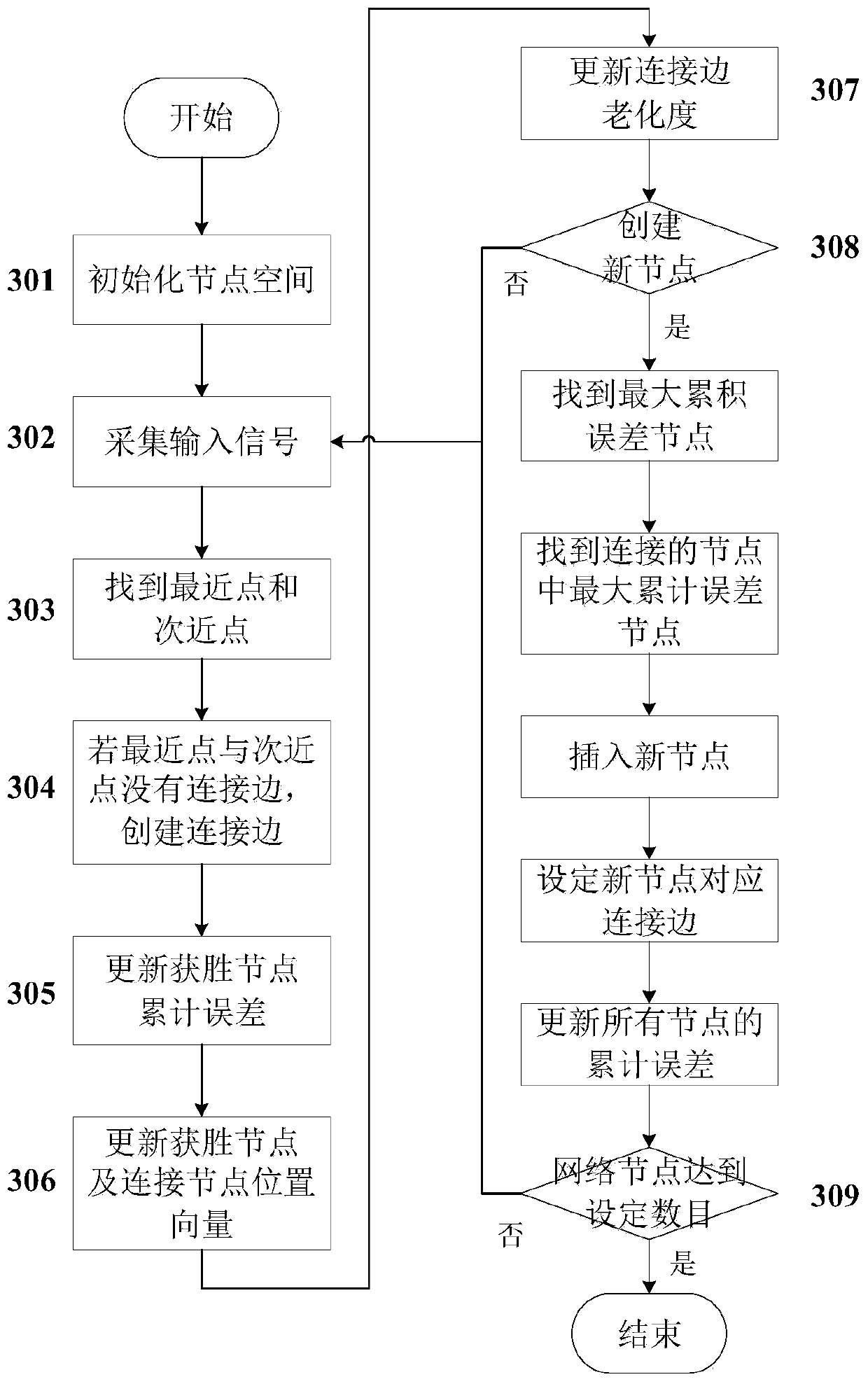
[0057] figure 1 It is an overall flow chart of the method for planning the cutting trajectory of the cantilever roadheader based on the topological map according to the embodiment of the present invention. Such as figure 1 As shown, the cutting trajectory planning method of the cantilever roadheader based on the topological map needs to explore the environment of the roadway section and construct the topological map at the same time. The method includes:
[0058] Step 101: Discriminate the cutting environment of the roadheader according to the identification model of the complex structure of the roadway section;
[0059] The identification model of the complex structure of the roadway section is
[0060] Among them, N(I) represents the active power of the cutting motor, I is the cutting current, and P Fe Indicates core loss; P Cu1 Indi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com