Image appearance based loop closure detecting method in monocular vision SLAM (simultaneous localization and mapping)
A closed-loop detection and monocular vision technology, applied in two-dimensional position/channel control, instrument, character and pattern recognition, etc., can solve the closed-loop detection requirements that cannot meet the efficiency and real-time of SLAM problems, and are prone to error closed-loop Detection, low accuracy and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0041] The technical scheme of the present invention is described in detail below in conjunction with accompanying drawing:
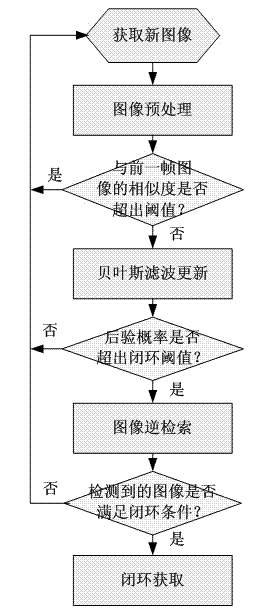
[0042] The closed-loop detection method based on image appearance in the monocular vision SLAM of the present invention, its basic process is as follows figure 1 shown, including the following steps:
[0043] Step 1. The mobile robot collects the current image with its own monocular camera, and extracts the visual bag-of-words feature of the current image.
[0044]In the BoVW image feature model (for details, please refer to [T. Botterill, S. Mill, R. Green. Bags-of-words-driven, single camera simultaneous localization and mapping. Journal of Field Robotics, 2011, 28 (2) :204-226]), a visual dictionary is built with a large number of image local visual feature vectors, and each local visual feature is used as a visual word in the visual dictionary. In this way, based on the created visual dictionary, any image can be used by visual The set of visual w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com