Substation inspection robot obstacle discrimination method and system
An inspection robot and a discrimination method technology, applied in neural learning methods, three-dimensional object recognition, instruments, etc., can solve the problems of low obstacle discrimination accuracy, failure of working mechanism, easy to be affected by light factors, etc., to improve inspection Accuracy and work efficiency, improving feature extraction capabilities, reducing labor costs and human errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
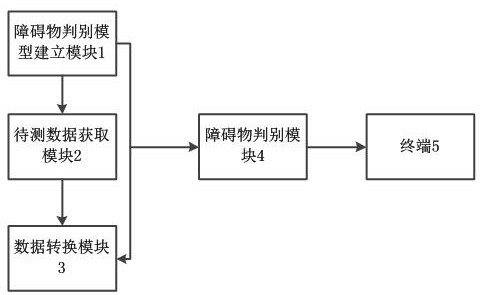
[0044] refer to figure 1 , which is a schematic structural diagram of an obstacle discrimination system for a substation inspection robot in this embodiment. Specifically, the system includes:
[0045]Obstacle discrimination model building module 1 is used to obtain the original 3D lidar point cloud data around the inspection robot in the substation scene, and extract part of the original point cloud data according to the ROI area, and then convert the three-dimensional original point cloud data into two-dimensional original points After the cloud bird's-eye view is input into the deep convolutional neural network, the stochastic gradient descent algorithm is used to train the deep convolutional neural network model to obtain the obstacle discrimination model;
[0046] In this embodiment, the obstacle discrimination model building module 1 also includes an SSD network optimization unit, which is used to add DenseNet dense blocks to the VGG-16 backbone network in the SSD networ...
Embodiment 1
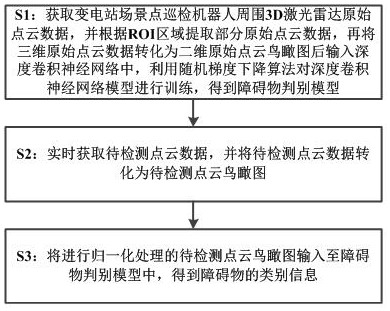
[0057] Based on the system of Embodiment 1, this embodiment discloses an obstacle discrimination method for a substation inspection robot, refer to figure 2 , including the following steps:
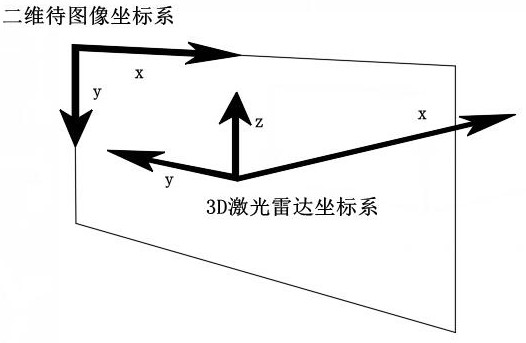
[0058] S1: Obtain the original 3D lidar point cloud data around the inspection robot in the substation scene, and extract part of the original point cloud data according to the ROI area, and then convert the three-dimensional original point cloud data into a bird's-eye view of the original two-dimensional point cloud, and then input the deep convolution In the neural network, the stochastic gradient descent algorithm is used to train the deep convolutional neural network model to obtain the obstacle discrimination model;
[0059] Specifically, in this embodiment, the 3D lidar point cloud data of different scenes in the substation and the camera photos corresponding to each frame of point cloud are collected by the substation inspection robot, and the 3D original point cloud data is conve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com