Brake shoe breaking target detection method
A target detection and brake shoe technology, applied in neural learning methods, image data processing, biological neural network models, etc., can solve the problems of low efficiency, high cost, low accuracy, etc., to improve accuracy, save labor costs, The effect of improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
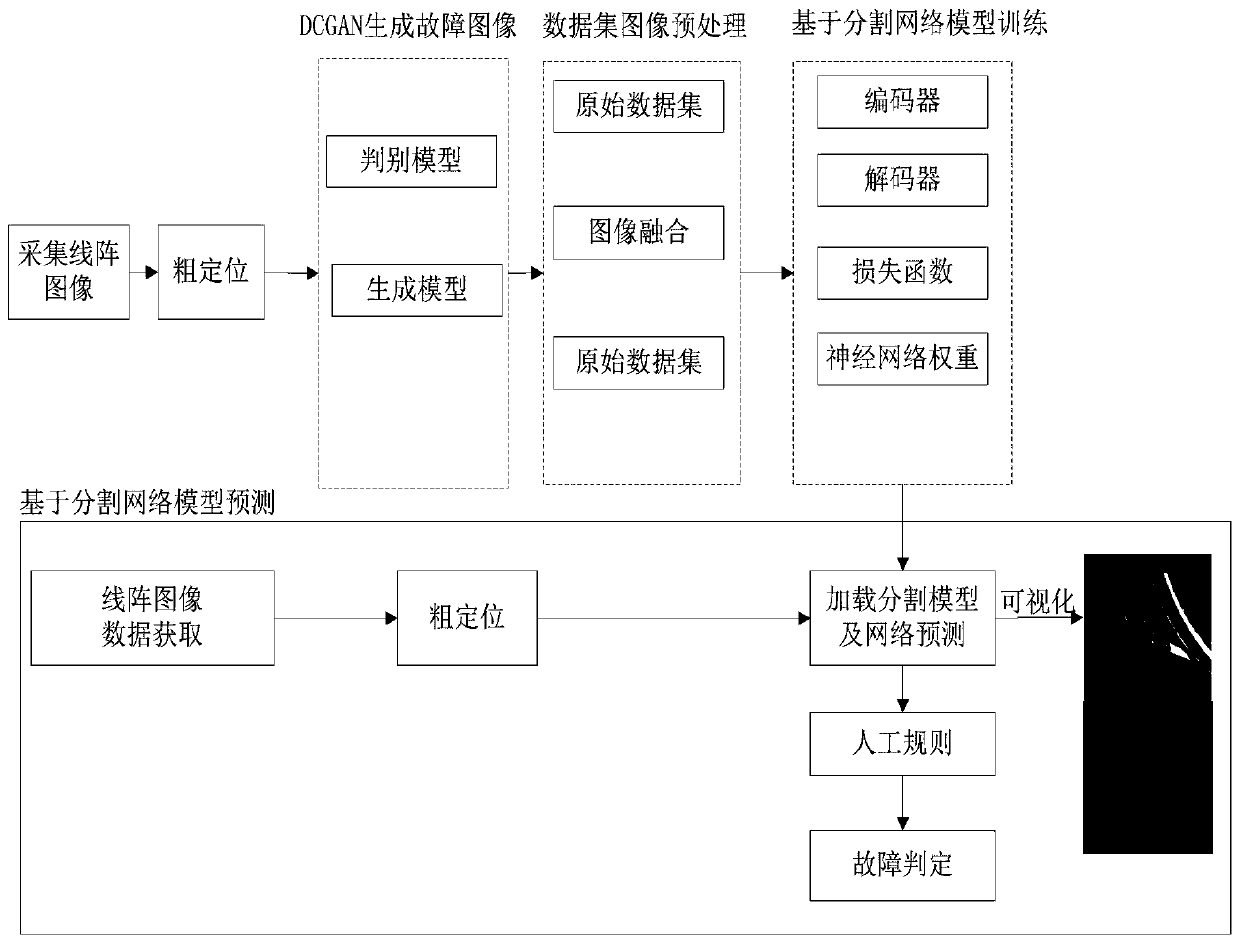
[0033] Specific implementation mode one: the specific process of the brake shoe broken target detection method in this implementation mode is as follows:
[0034] Step 1, line array image acquisition;
[0035] Step 2, coarse positioning;
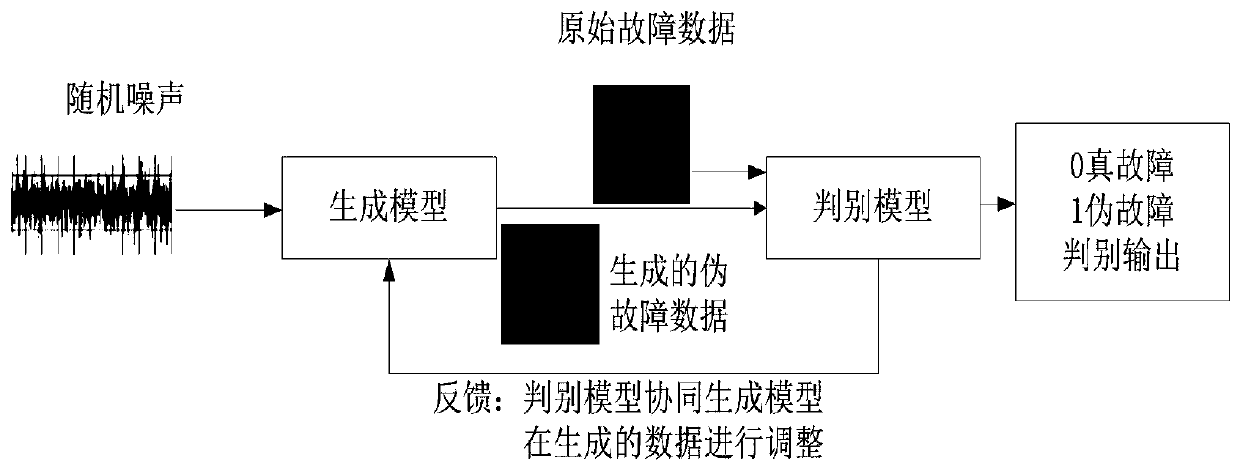
[0036] Step 3: Generate a confrontation network DCGAN, and generate a fault image based on the confrontation network DCGAN;
[0037] Since there are few real fault forms of brake shoe breakage collected, better multi-modal fault identification cannot be achieved, so it is necessary to use a deep generative adversarial network to generate multi-modal fault images. Such as figure 2 Schematic diagram of the generative confrontation network structure. The generation model generates pseudo-fault data according to random noise, and then puts the fault data and pseudo-fault data into the discriminant model for discrimination. The discriminant model cooperates with the generative model to adjust the generated data, and the cycle repeats until a c...
specific Embodiment approach 2
[0044] Embodiment 2: The difference between this embodiment and Embodiment 1 is that the linear array image is acquired in the step 1; the specific process is:
[0045] Use fixed equipment to carry cameras or video cameras to shoot high-speed moving railway wagons, and take images of the entire vehicle on the upper part, both sides and bottom of the railway wagon; only scan one line of the railway wagon at a time, which can realize seamless splicing and generate a field of view Large, high-resolution 2D images.
[0046] Other steps and parameters are the same as those in Embodiment 1.
specific Embodiment approach 3
[0047] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is that the rough positioning in the step two; the specific process is:
[0048] According to the prior knowledge such as the wheelbase information of the hardware and the position of the parts, the area of the brake shoe parts to be recognized is cut out from the image information of the whole vehicle, so as to reduce the amount of calculation and improve the speed of recognition.
[0049] Other steps and parameters are the same as those in Embodiment 1 or Embodiment 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com