Dynamic matrix control method for permanent magnet synchronous motor
A dynamic matrix control, permanent magnet synchronous motor technology, applied in motor control, motor generator control, electronic commutation motor control, etc., can solve the problems of PMSM application impact, cost increase, PMSM weight and volume increase, etc. unaffected effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0084] A dynamic matrix control method for a permanent magnet synchronous motor, the steps are as follows:
[0085] 1. Establish the dq-axis mathematical model of PMSM, use the extended Kalman filter EKF as a random observer, and correct the predicted variables through the observed variables of the extended Kalman filter algorithm, so as to obtain the optimal predicted value;
[0086] 2. Use the extended Kalman filter EKF to construct vector control, set the rotor flux linkage, speed and rotor position angle as the state variables, and the stator voltage as the input variable. If the sampling frequency of the closed-loop control of the speed is compared with the mechanical time constant of the motor or If the moment of inertia is large enough, the speed is constant in the sampling period, so that the speed estimation error is attributed to the system noise, and the accuracy of the motor model is not affected;
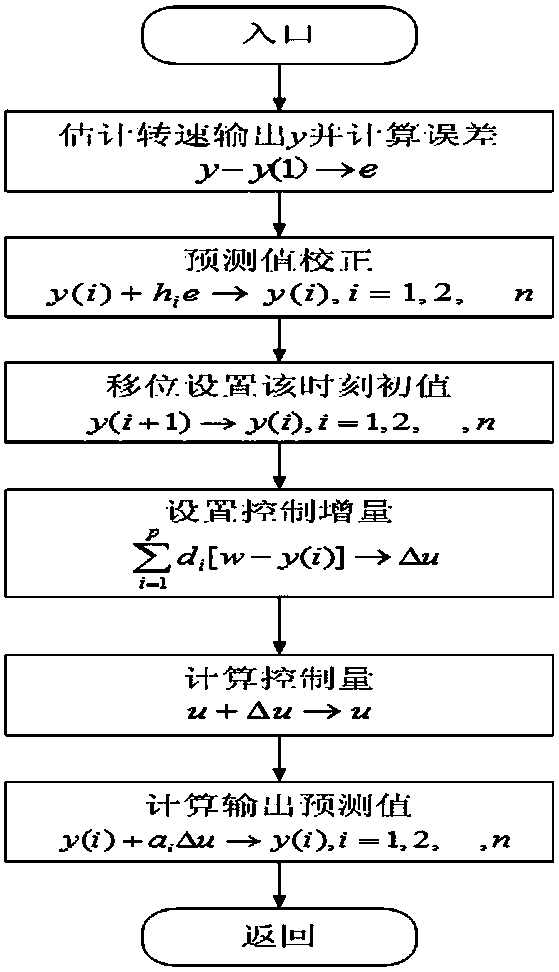
[0087] 3. Realize PMSM with DMC algorithm. DMC algorithm uses the ...
Embodiment 2
[0090] As a preference for Example 1, the PMSM is a surface-mounted PMSM. When PMSM is used as the driving equipment of the oil drilling rig system, the surface-mounted PMSM is used as the research object because the permanent magnet pole of the surface-mounted PMSM is convenient for the realization of the optimal design and is conducive to improving the control performance of the motor.
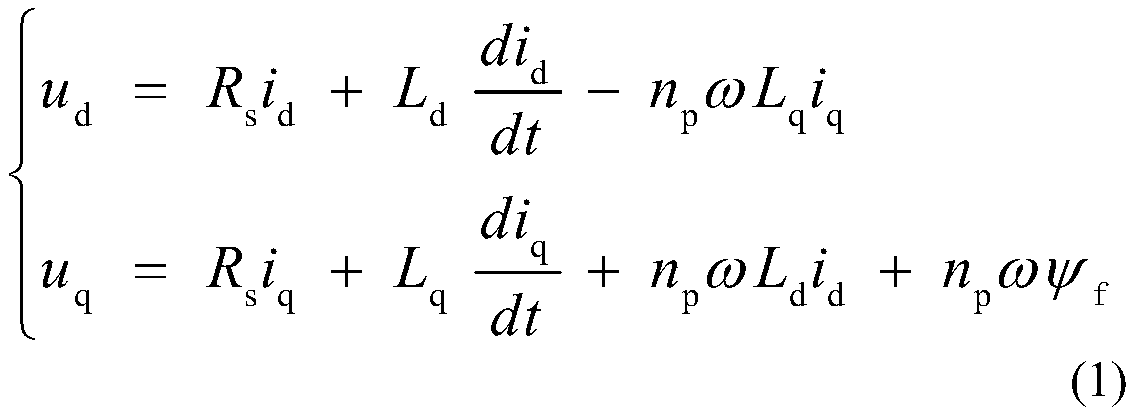
[0091] The dq-axis mathematical model of PMSM is established as follows:
[0092] Voltage Equation (1)
[0093]
[0094] Electromagnetic torque equation (2)
[0095]
[0096] Mechanical Equations of Motion (3)
[0097]
[0098] In the formula, i d , i q and u d , u q are the dq components of stator current and voltage respectively; L d , L q and ψ d , ψ q are the dq components of the stator inductance and flux linkage; R S is the stator resistance; ω is the rotor mechanical angular velocity; n p is the polar logarithm; ψ f is the permanent magnet flux linkage; T e ,T ...
Embodiment 3
[0104] As a preference to embodiment 2, the steps of the extended Kalman filter algorithm include:
[0105]
[0106]
[0107] Among them, M and N are the covariance matrix of V and W respectively, K(k+1) is the gain matrix, the superscript ~ is the predicted value, and the superscript ∧ is the check value.
[0108] In the second step, using the extended Kalman filter EKF to construct vector control refers to: the dq axis is the αβ axis model, the EKF observer is designed under the αβ axis, the EKF is used to construct the vector control, and the rotor flux linkage ψ α 、ψ β , the rotational speed ω and the rotor position angle θ are the state variables, and the motor state equation and measurement equation take the stator voltage as the input variable. If the sampling frequency of the closed-loop control of the rotational speed is sufficiently large compared to the mechanical time constant or moment of inertia of the motor, the rotational speed is in The sampling period ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com