Accurately moving and anti-impact robot leg device
A technology of impact resistance and robotics, applied in the field of robotics, can solve the problems that the material properties cannot be fully exerted, and achieve the effects of novel transmission structure, improved impact resistance, and good buffering effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
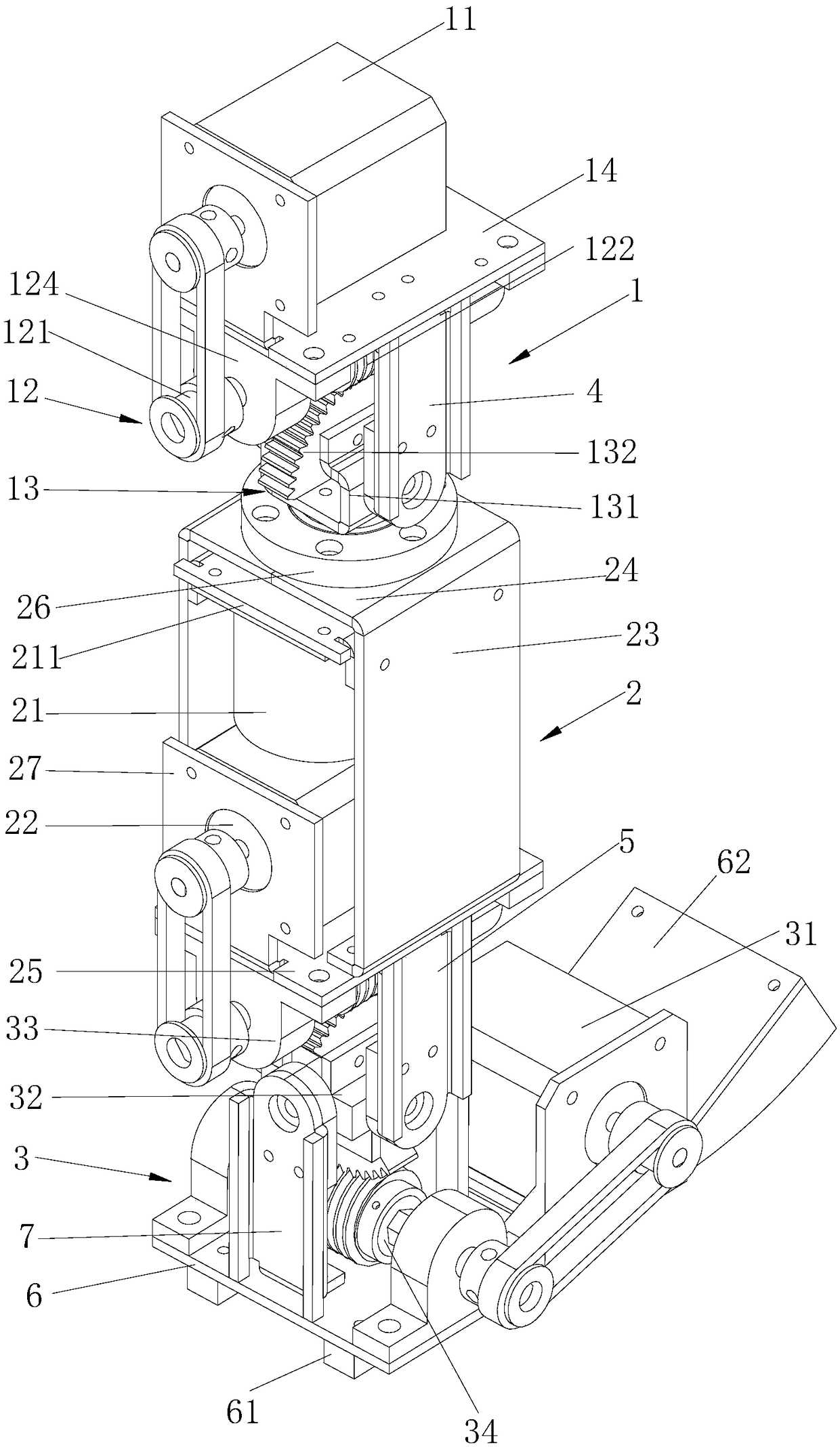
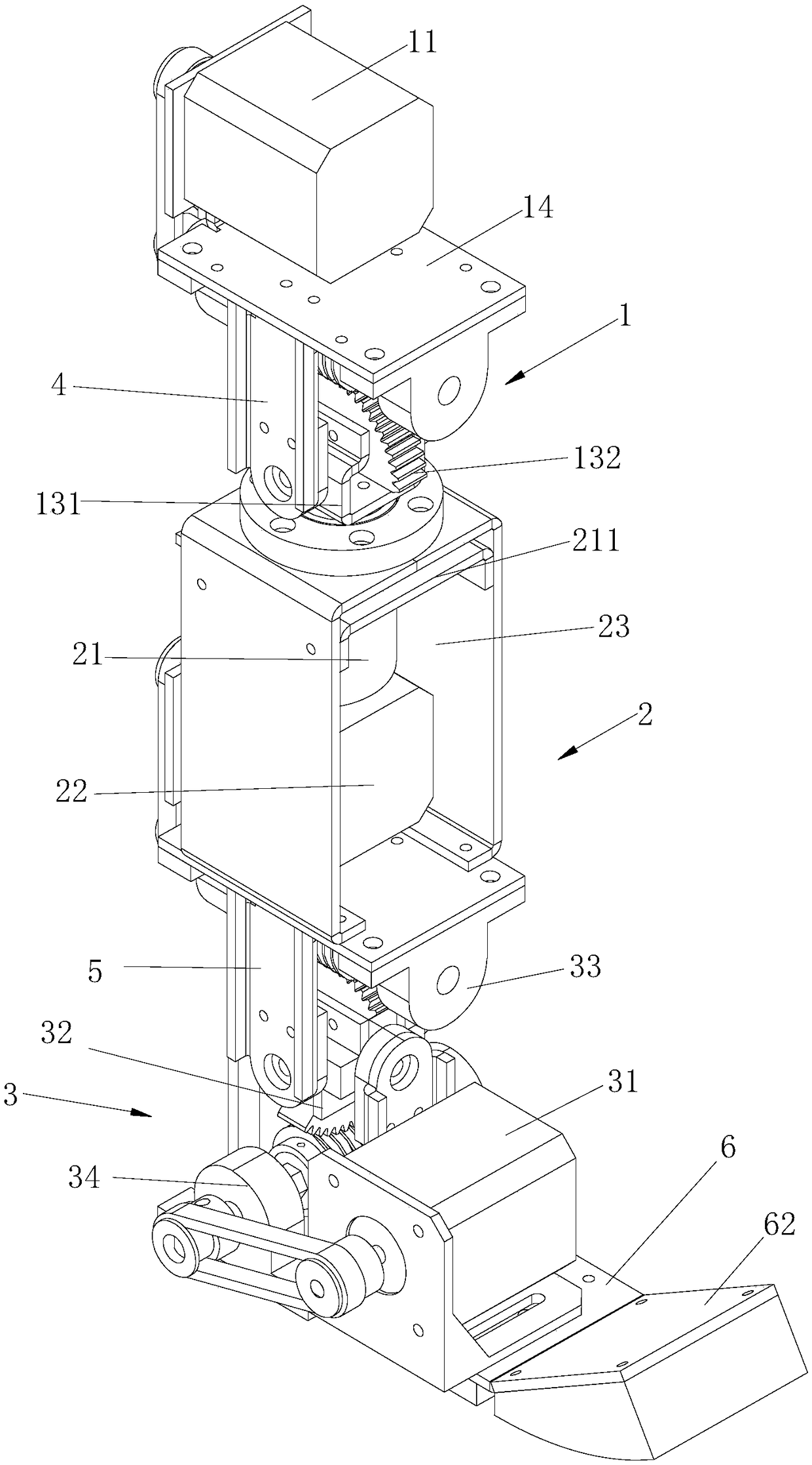
[0056] Embodiment 1. When the above-mentioned anti-impact robot leg device with precise movement is working normally, the output shaft of the first motor 11 is connected with the first worm shaft through a belt, and the first worm shaft drives the first hollow worm to rotate. The forward rotation and reverse rotation of the first motor 11 drive the forward rotation and reverse rotation of the first hollow worm 122, so that the first worm wheel 132 moves in the front and rear direction, and the first hollow worm and the first joint mechanism are connected through a worm gear transmission. . In a normal working state, the first worm gear 132 cannot drive the first hollow worm 122 to move along the axis of the first worm shaft 121 .
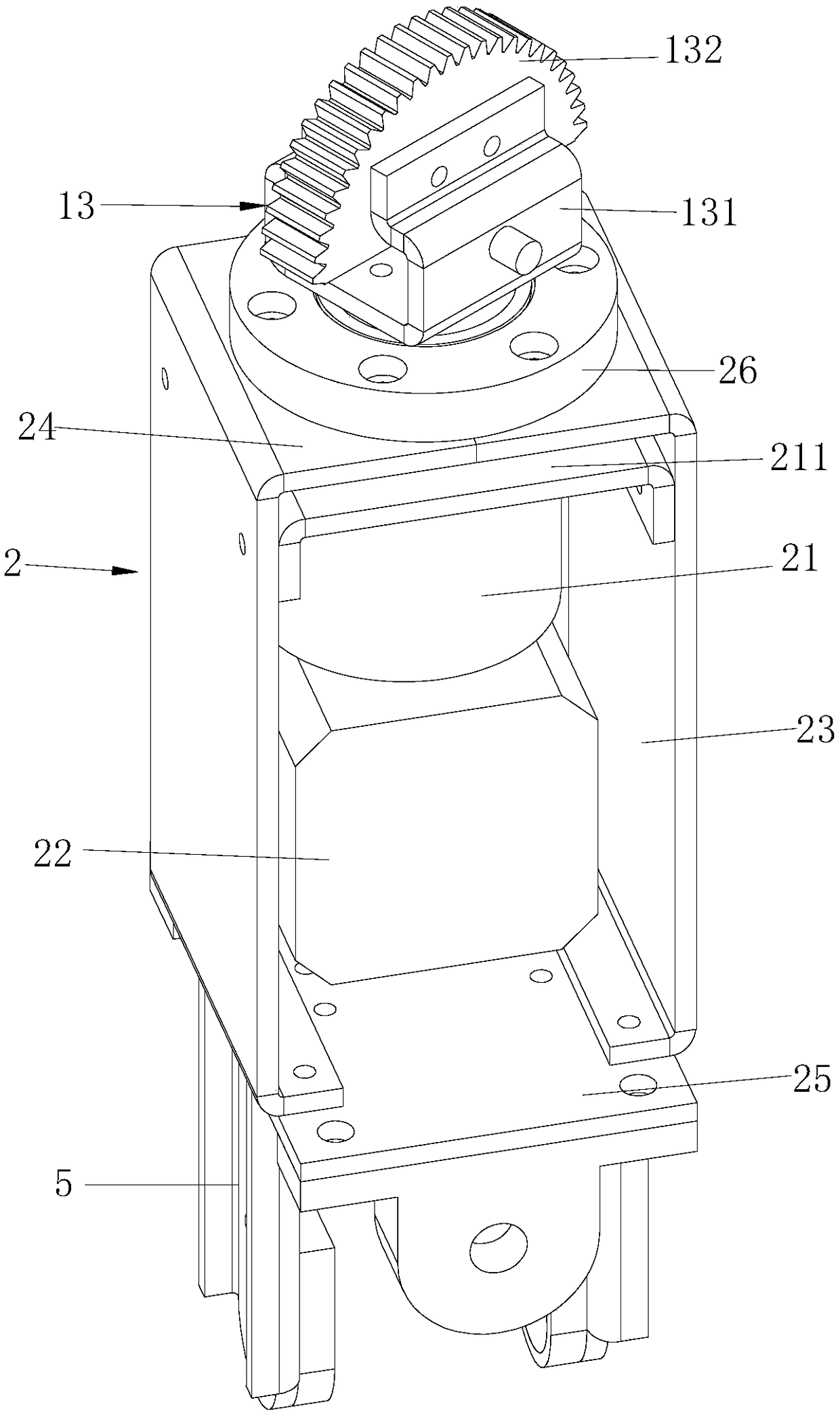
[0057] The output shaft of the second motor 21 is connected with the first joint seat 131, and the forward rotation and reverse rotation of the second motor 21 can drive the structure below the first joint mechanism 13 to rotate in the left and righ...
Embodiment 2
[0061] Embodiment 2, when the robot is impacted and the knee joint structure 1 is subjected to an impact force, and the impact force is greater than the initial pressure of the first circular spring 111 in the knee joint structure 1, the first worm gear 132 will drive the first hollow worm 122 along the second A worm shaft 121 moves in the axial direction. The force received by the knee joint structure 1 is transmitted to the first hollow worm 122 .
[0062] Due to the self-locking property of the connection between the first worm wheel 132 and the first hollow worm 122, the first worm wheel 132 cannot drive the first hollow worm 122 to rotate around the axis. The force is greater than the preload of the first circular spring 111 on the first hollow worm 122, the first hollow worm 122 will move along the axis under the pressure of the first worm wheel 132 to further compress the first circular spring 111, and the energy generated by the impact will be converted into a spring ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com