Control structure and method for virtual synchronous machine of voltage source converter based high voltage direct current (VSC-HVDC) system
A technology of VSC-HVDC and virtual synchronous machine, which is applied to the control of the above-mentioned VSC-HVDC system virtual synchronous machine and the field of VSC-HVDC system virtual synchronous machine control structure to achieve the effect of improving stability and enhancing reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
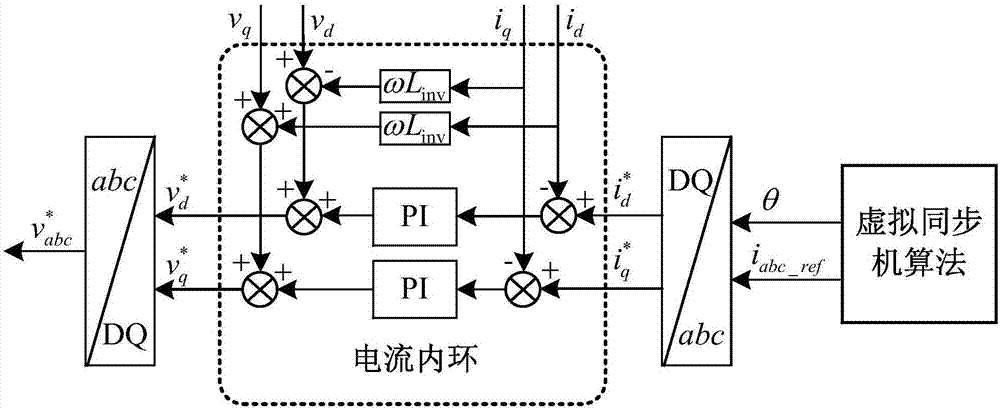
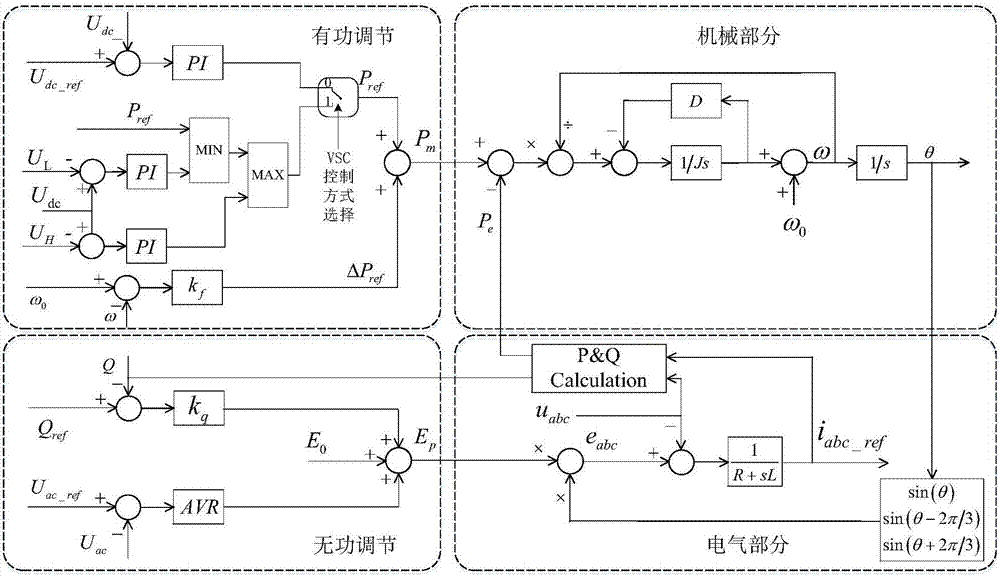
[0041] Active power control is a combination of power controller, DC voltage deviation controller and VSC virtual synchronous machine f-P droop controller. The specific control method of this method is:
[0042] Step 1, determine the mechanical equation and electromagnetic equation of the VSC virtual synchronous machine, expressed as Where J is the moment of inertia of the VSC virtual synchronous machine, D is the damping coefficient, r t is the synchronous resistance, l t is the synchronous reactance, ω is the angular velocity, P m is the mechanical power, P e is the electromagnetic power, ω N is the rated angular velocity, ω r is the grid angular velocity, e abc , v abc i abc are the three-phase terminal potential, voltage and current of the VSC virtual synchronous machine, respectively, j, d, t; where v abc is the measured VS output voltage of the virtual synchronous machine, e abc Via the VSC virtual synchronous machine potential input E p and angular velocity ω...
Embodiment 2
[0049] Active power regulation is a combination of DC voltage controller and VSC virtual synchronous machine f-P droop controller. The control method is specifically:
[0050] Step 1, determine the mechanical equation and electromagnetic equation of the VSC virtual synchronous machine, expressed as Where J is the moment of inertia of the VSC virtual synchronous machine, D is the damping coefficient, r t is the synchronous resistance, l t is the synchronous reactance, ω is the angular velocity, P m is the mechanical power, P e is the electromagnetic power, ω N is the rated angular velocity, ω r is the grid angular velocity, e abc , v abc i abc are the three-phase terminal potential, voltage and current of the VSC virtual synchronous machine, respectively, j, d, t; where v abc is the measured VS output voltage of the virtual synchronous machine, e abc Via the VSC virtual synchronous machine potential input E p and angular velocity ω to get: in
[0051] Step 2, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com