Versatile square type acceleration and deceleration control algorithm
An acceleration and deceleration control, acceleration and deceleration technology, applied in the direction of program control, digital control, comprehensive factory control, etc., can solve the problems affecting the stability and efficiency of the stacker movement, discontinuous acceleration, discontinuous acceleration, etc. The effect of high impact, smooth speed and short run time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
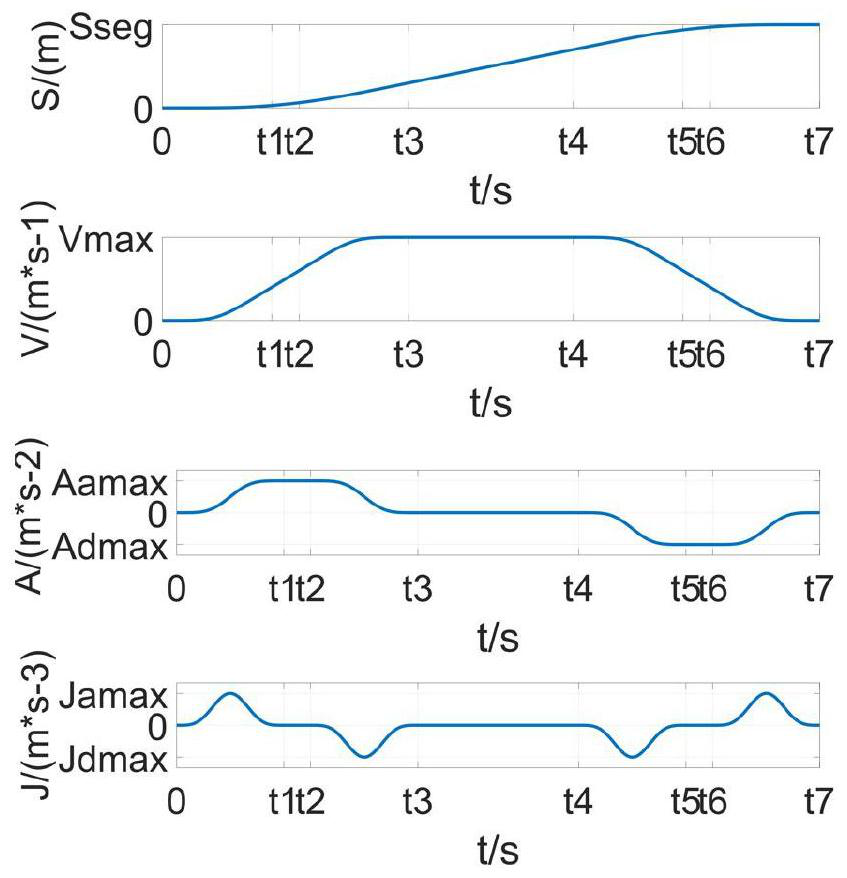
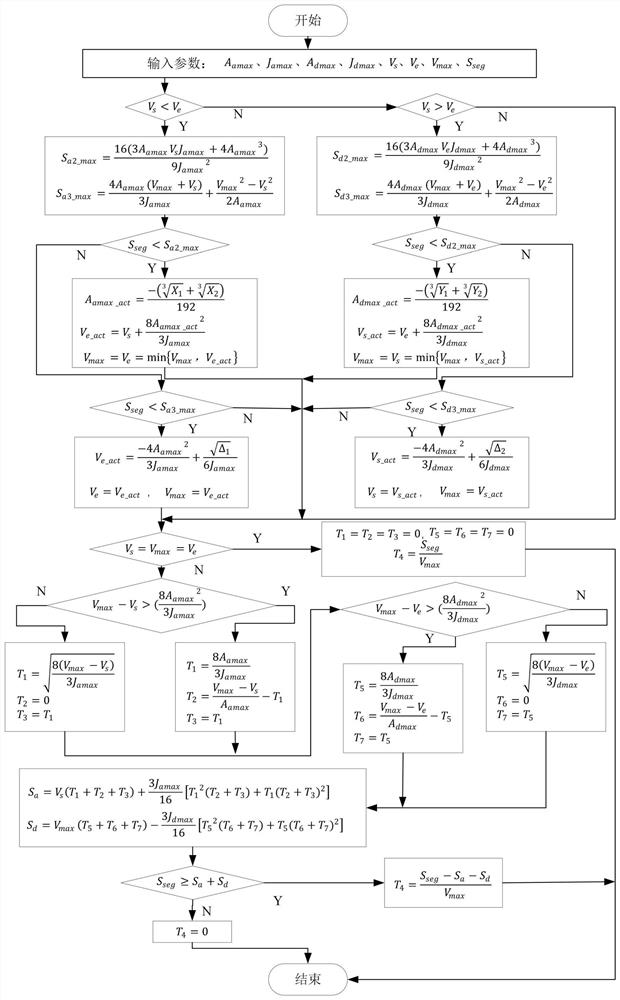
[0103] see Figure 1-2 , a sine square type acceleration and deceleration control algorithm, including the following steps:
[0104] S1: The input parameters of the algorithm have system mechanical performance constraints and trajectory constraints;
[0105] S2: output time parameter, definition, time parameter;
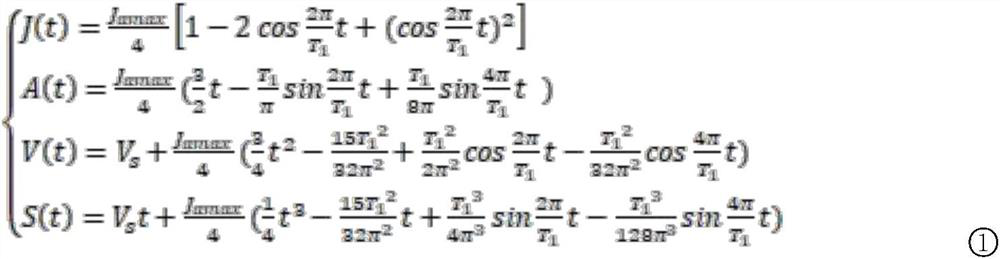
[0106] S3: Define the relationship expression between each parameter curve and the time parameter of the sine square acceleration and deceleration algorithm;
[0107] S4: Implement the sine square type acceleration and deceleration control algorithm.
[0108] Preferably, the mechanical performance constraints in S1 include the maximum acceleration A in the acceleration movement stage amax , the maximum jerk J in the acceleration motion phase amax , the maximum acceleration A in the deceleration motion stage dmax , the maximum jerk J in the deceleration motion stage dmax , the trajectory constraints include the maximum velocity V max , starting speed V s , the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com