Wheel-legged robot and leg joint driving device thereof
A wheel-legged robot and driving device technology, which is applied to fluid pressure actuating devices, motor vehicles, mechanical equipment, etc., can solve the problems of low transmission efficiency of hydraulic systems, small output torque of joint driving devices, and complex system components.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
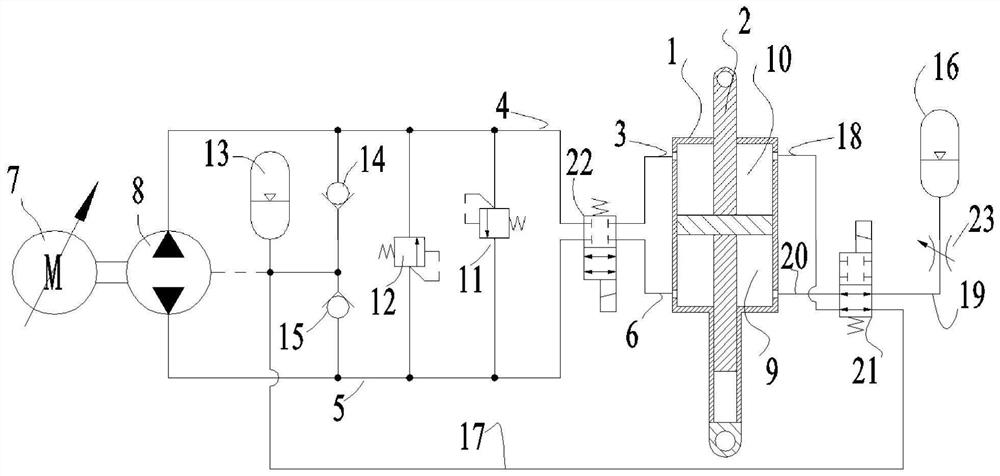
[0038] See attached Figure 1~5 . A driving device for leg joints of a wheel-leg robot, including a hydraulic control system; the hydraulic control system includes a hydraulic cylinder 1, a piston rod 2, a main oil circuit, a secondary oil circuit, a servo motor 7 and a hydraulic pump 8; the hydraulic cylinder 1 is provided with a load chamber 9 and a non-load chamber 10; the piston rod 2 separates the load chamber 9 and the non-load chamber 10; the servo motor 7 is used to drive the hydraulic pump 8; the non-load chamber 10, the main oil circuit , the hydraulic pump 8 , the secondary oil circuit and the bearing chamber 9 are connected in sequence; the elongation of the piston rod 2 relative to the hydraulic cylinder 1 changes with the hydraulic oil capacity in the bearing chamber 9 and the non-bearing chamber 10 . It can be seen from the above structure that if the circuit formed by the non-bearing chamber 10, the main oil circuit, the hydraulic pump 8, the secondary oil cir...
Embodiment 2
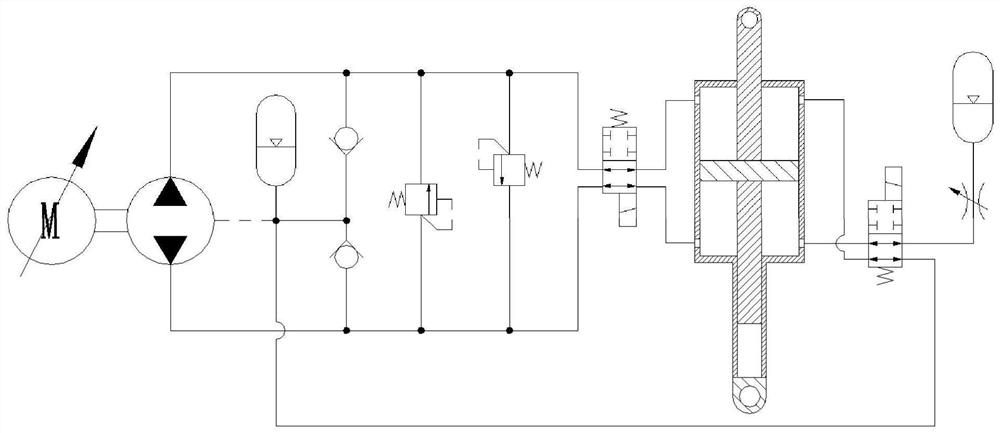
[0050] See attached Figure 4~6 . A driving device for leg joints of a wheel-leg robot, including a hydraulic control system; the hydraulic control system includes a hydraulic cylinder 1, a piston rod 2, a main oil circuit, a secondary oil circuit, a servo motor 7 and a hydraulic pump 8; the hydraulic cylinder 1 is provided with a load chamber 9 and a non-load chamber 10; the piston rod 2 separates the load chamber 9 and the non-load chamber 10; the servo motor 7 is used to drive the hydraulic pump 8; the non-load chamber 10, the main oil circuit , the hydraulic pump 8 , the secondary oil circuit and the bearing chamber 9 are connected in sequence; the elongation of the piston rod 2 relative to the hydraulic cylinder 1 changes with the hydraulic oil capacity in the bearing chamber 9 and the non-bearing chamber 10 . It can be seen from the above structure that if the circuit formed by the non-bearing chamber 10, the main oil circuit, the hydraulic pump 8, the secondary oil cir...
Embodiment 3
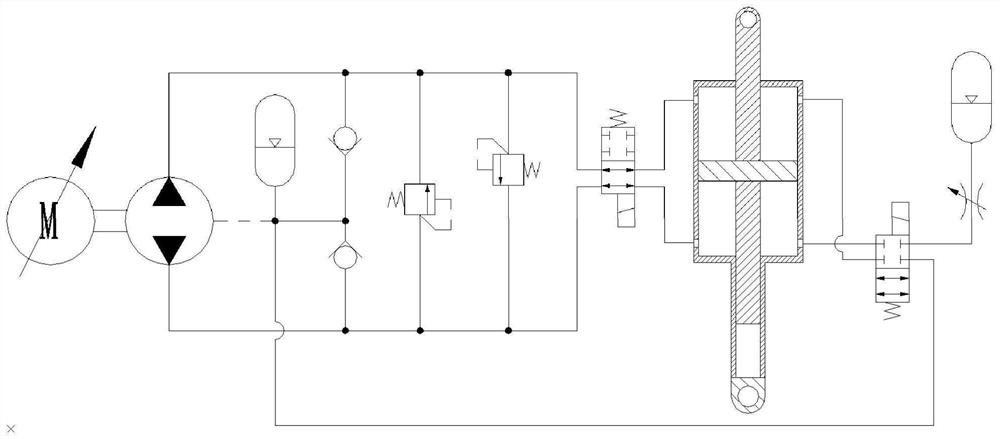
[0062] See attached Figure 7-9 . A driving device for leg joints of a wheel-leg robot, including a hydraulic control system; the hydraulic control system includes a hydraulic cylinder 1, a piston rod 2, a main oil circuit, a secondary oil circuit, a servo motor 7 and a hydraulic pump 8; the hydraulic cylinder 1 is provided with a load chamber 9 and a non-load chamber 10; the piston rod 2 separates the load chamber 9 and the non-load chamber 10; the servo motor 7 is used to drive the hydraulic pump 8; the non-load chamber 10, the main oil circuit , the hydraulic pump 8 , the secondary oil circuit and the bearing chamber 9 are connected in sequence; the elongation of the piston rod 2 relative to the hydraulic cylinder 1 changes with the hydraulic oil capacity in the bearing chamber 9 and the non-bearing chamber 10 . It can be seen from the above structure that if the circuit formed by the non-bearing chamber 10, the main oil circuit, the hydraulic pump 8, the secondary oil cir...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com