Vehicle trajectory clustering method based on parallel ST-AGNES algorithm
A technology of ST-AGNES and vehicle trajectory, which is applied in the field of vehicle trajectory algorithm, can solve the problems of not being able to satisfy large-scale trajectory data analysis, unfavorable popularization and application, and expensive high-performance computers.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments. The schematic embodiments and descriptions of the present invention are used to explain the present invention, but are not intended to limit the present invention.
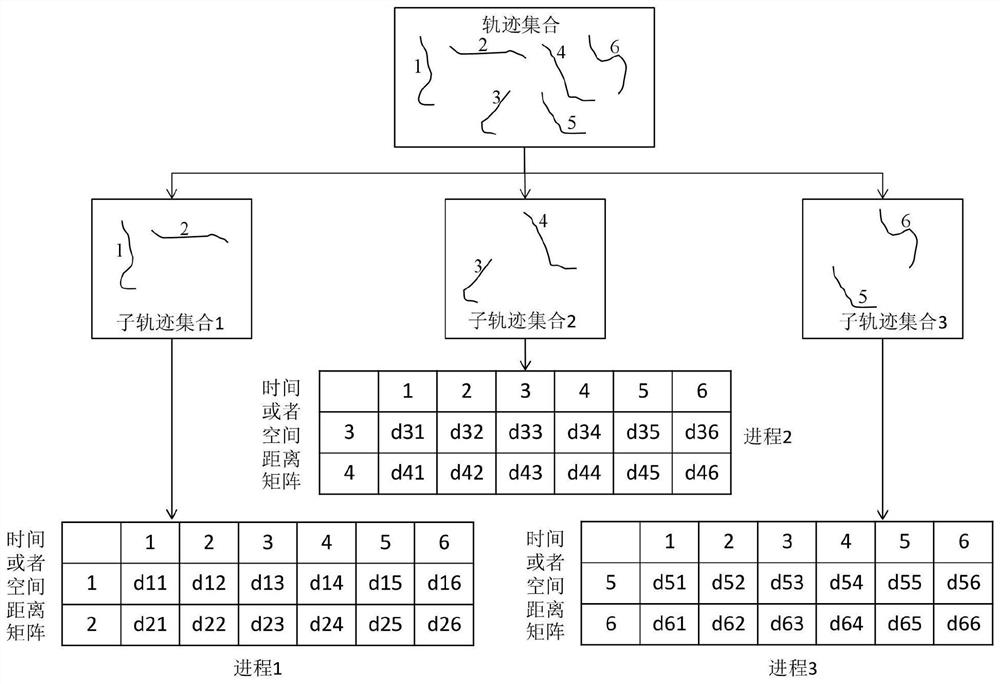
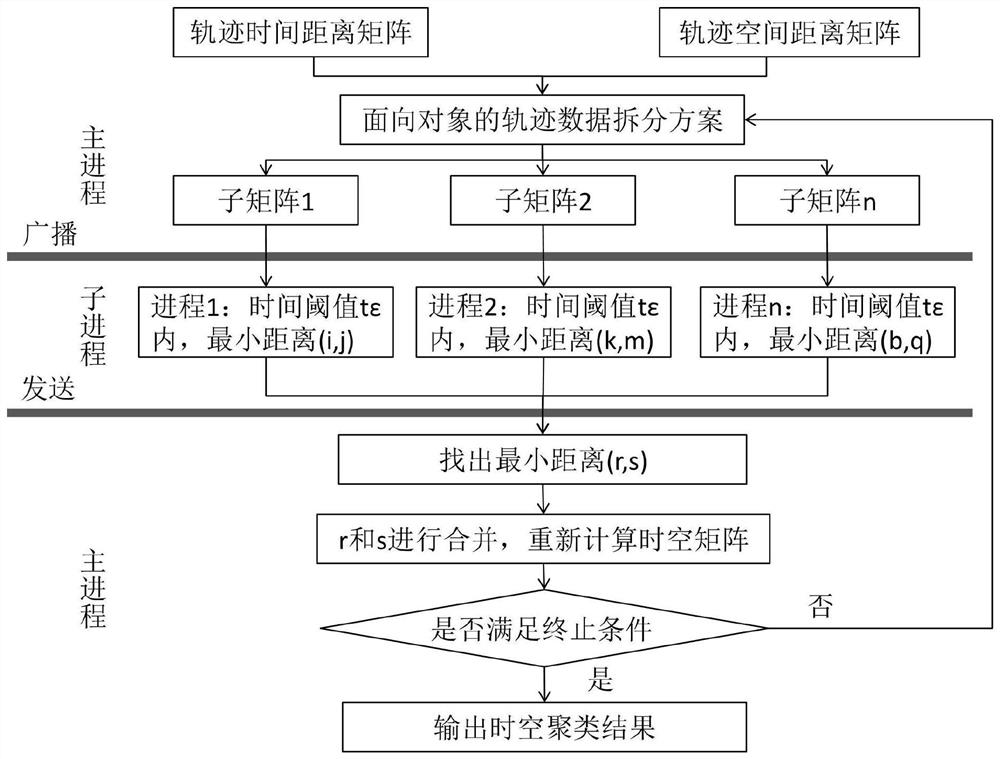
[0041] The present invention simultaneously utilizes multiple processing units to work together and simultaneously executes vehicle track clustering analysis to achieve higher performance.
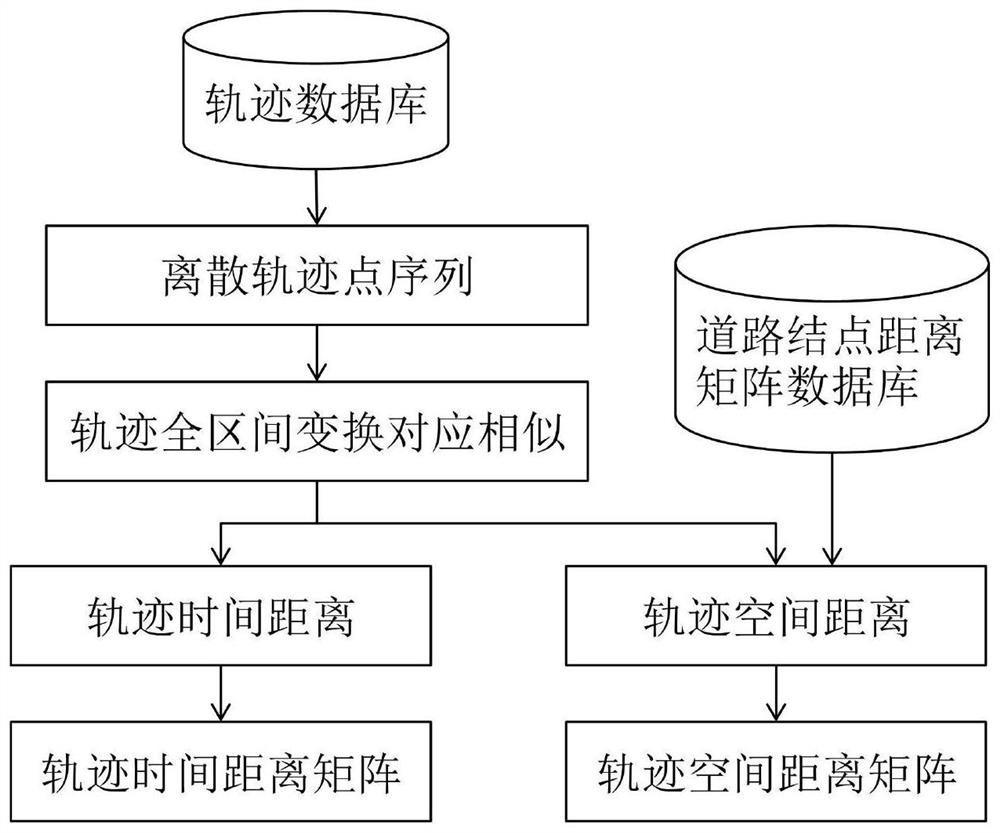
[0042] The main purpose of the vehicle trajectory clustering algorithm is to try to group trajectories with similar behaviors together and to divide trajectories with different behaviors. Trajectory data has both temporal and spatial characteristics, and the key to spatiotemporal clustering of vehicle trajectories is to define the spatiotemporal similarity between trajectories. DTW is a representative method that corresponds to the similarity of the whole interval transformation. Under the premis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com