Non-contact type nasopharynx detection robot
A non-contact, robotic technology, applied in the fields of ovulation vaccination diagnosis, medical science, surgery, etc., can solve the problems of poor comfort, inner epidermis damage, and difficult withdrawal of cotton swabs, etc., to avoid cross-infection and ensure health and safety , the effect of protecting against infection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
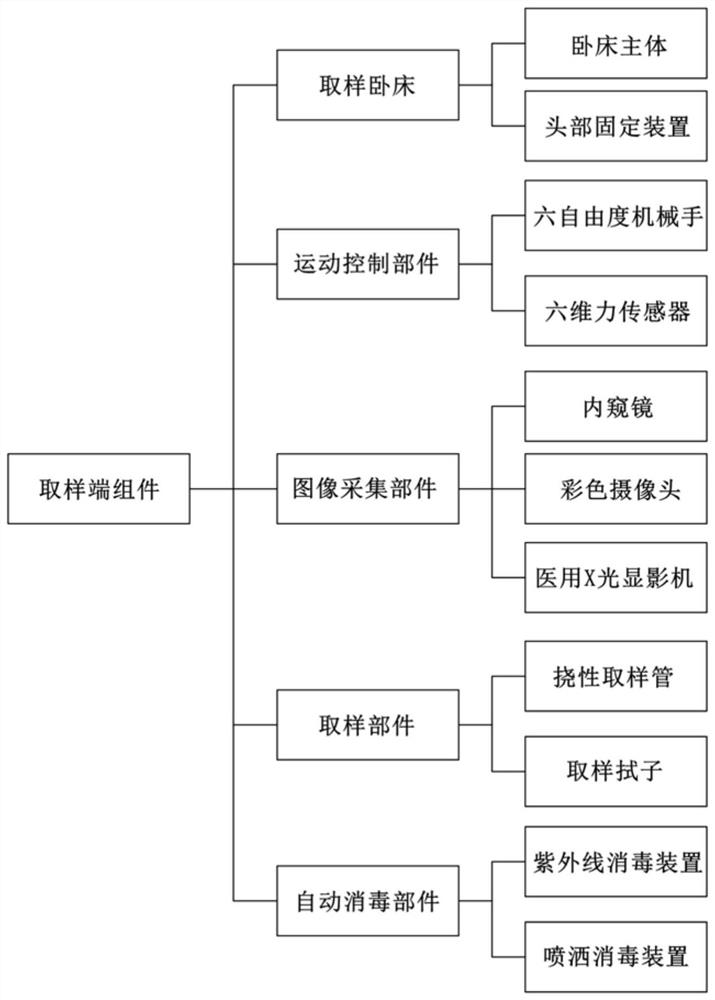
[0032] see Figure 1-6 , a non-contact nasopharyngeal detection robot, including a sampling end assembly, a signal transmission assembly, a control end assembly, and a power supply, the sampling end assembly is used to receive signals, and the action of automatic nasopharyngeal swab sampling, the signal transmission The components are used to complete the real-time two-way transmission of signals between the sampling end components and the control end components. The control end components are used to send instructions for nasopharyngeal swab sampling and control the sampling end components to perform sampling work. energy supply for components, signal transmission components and control end components;
[0033] In this embodiment, the sampling end assembly includes a sampling bed, a motion control part, an image acquisition part, a sampling part, and an automatic disinfection part. Fixation of the part, the motion control part includes a six-degree-of-freedom manipulator and...
Embodiment 2
[0045] see Figure 1-6 , a non-contact nasopharyngeal detection robot, including a sampling end assembly, a signal transmission assembly, a control end assembly, and a power supply, the sampling end assembly is used to receive signals, and the action of automatic nasopharyngeal swab sampling, the signal transmission The components are used to complete the real-time two-way transmission of signals between the sampling end components and the control end components. The control end components are used to send instructions for nasopharyngeal swab sampling and control the sampling end components to perform sampling work. energy supply for components, signal transmission components and control end components;
[0046] In this embodiment, the sampling end assembly includes a sampling bed, a motion control part, an image acquisition part, a sampling part, and an automatic disinfection part. Fixation of the part, the motion control part includes a six-degree-of-freedom manipulator and...
Embodiment 3
[0058] see Figure 1-6 , a non-contact nasopharyngeal detection robot, including a sampling end assembly, a signal transmission assembly, a control end assembly, and a power supply, the sampling end assembly is used to receive signals, and the action of automatic nasopharyngeal swab sampling, the signal transmission The components are used to complete the real-time two-way transmission of signals between the sampling end components and the control end components. The control end components are used to send instructions for nasopharyngeal swab sampling and control the sampling end components to perform sampling work. energy supply for components, signal transmission components and control end components;
[0059] In this embodiment, the sampling end assembly includes a sampling bed, a motion control part, an image acquisition part, a sampling part, and an automatic disinfection part. Fixation of the part, the motion control part includes a six-degree-of-freedom manipulator and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com