Capacitive touch sensor, electronic skin and intelligent robot
A touch sensor, intelligent robot technology, applied in the field of electronic skin, intelligent robot, capacitive touch sensor, can solve the problems of difficult control of product consistency, inability to implement anti-crosstalk measures, loss of classification recognition and proximity of external objects, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0040] The present invention will be described in detail below in conjunction with the embodiments and the accompanying drawings. It should be noted that the described embodiments are only intended to facilitate the understanding of the present invention, rather than limiting it in any way.
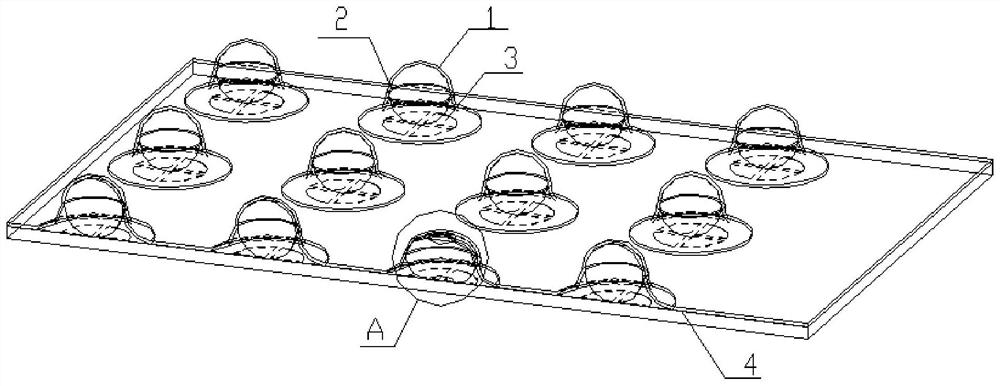
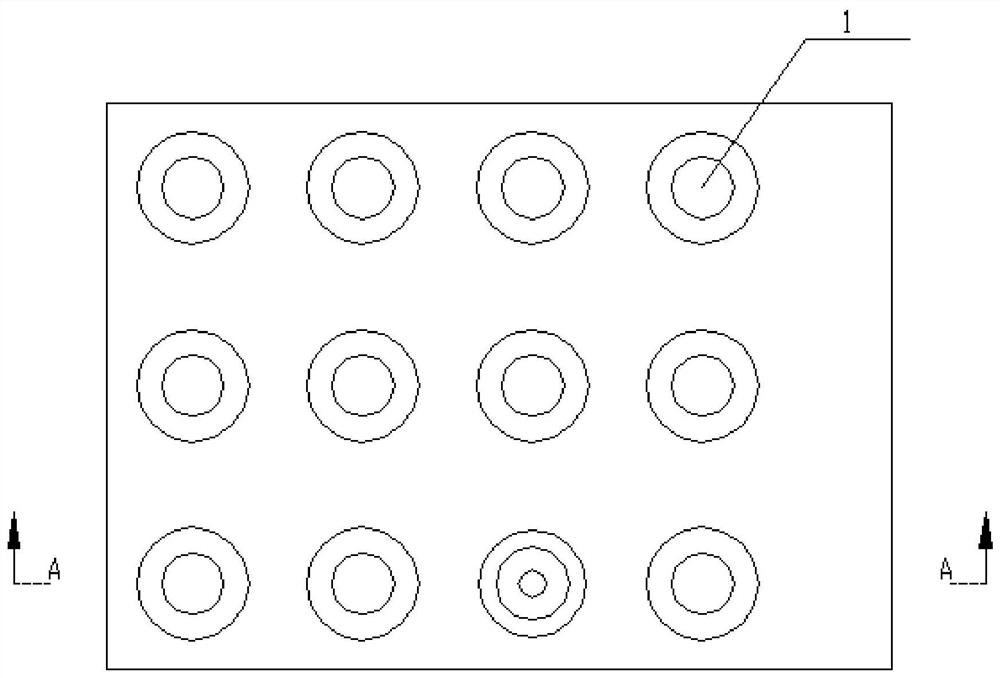
[0041] Such as Figure 1-4 As shown, a capacitive touch sensor provided in this embodiment includes a plurality of sensor units, each sensor unit includes a plurality of multifunctional layers 1, and each multifunctional layer 1 includes a corresponding area;
[0042] The inside of each multifunctional layer 1 is provided with an upper electrode 2 electrically connected to the multifunctional layer 1, and a lower electrode 3 corresponding to the upper electrode 2 is arranged below the upper electrode 2, and the upper electrode 2 is connected to the upper electrode 2. An insulating layer 4 is arranged between the lower electrodes 3; the upper electrode 2 is connected to an excitation signa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com