Panoramic monitoring system
A panoramic monitoring and panoramic technology, applied in the field of panoramic monitoring system, can solve the problems of high equipment and manpower requirements, discount of image authenticity, complex image acquisition data, etc., to achieve the effect of improved experience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0047] When all cameras in the monitoring system use 720-degree panoramic cameras, the corresponding position processing in S102 is as follows:
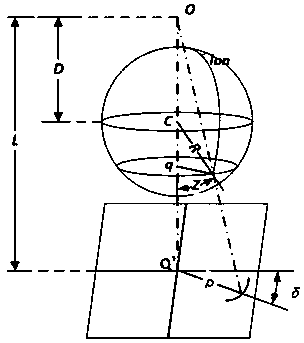
[0048] When performing projection transformation, the relative position and height of the camera installation need to be fully considered during the correction process of adjacent images, and the distortion consistency of the projection image should be ensured as much as possible during the projection process, so as to prevent the problem of real-time overall deformation of the projection image splicing caused by excessive distortion of the edge image . Here the installation height is as shown in the figure ( Figure 7 ), the maximum range of fov and plane projection is limited to:
[0049]
[0050]
[0051] Among them, fov represents the viewing angle range of the selected panoramic image; H represents the installation height of the panoramic camera; W represents the horizontal distance of the adjacent panoramic camera instal...
Embodiment 2
[0053] All cameras in the monitoring system use fisheye cameras to look down on the monitoring, and the following processing is performed in S102:
[0054] 1. Fisheye lens calibration: use the checkerboard pattern to calibrate the camera, and use the Zhang Zhengyou calibration method to calibrate the internal parameters of the lens;
[0055] 2. Fisheye image distortion processing is as follows:
[0056]
[0057] where r src Indicates the radius of the pixel ring centered on the center of the image circle in the original picture, r dest Indicates the radius of the pixel ring with the center of the image circle as the center in the conversion target picture, a, b, c, and d are correction coefficients, and the values are determined by the camera calibration method;
[0058] Carry out following processing in S103:
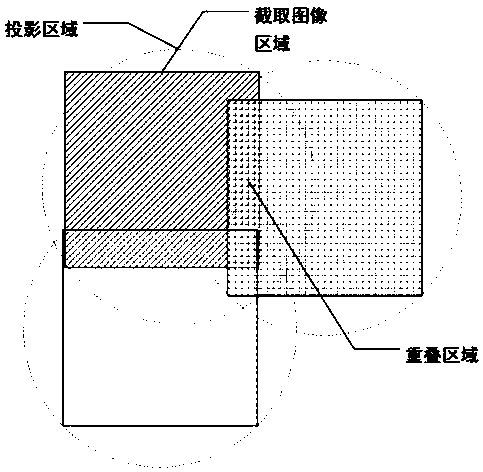
[0059] 3. Intercept the actual effective distortion area image;
[0060] 4. Splicing the captured images;
Embodiment 3
[0062] Under the condition that all cameras in the surveillance system use a combination of fisheye cameras and 720-degree panoramic cameras, the process in S102 is:
[0063] 1. Perform equidistant cylindrical projection transformation on the fisheye image, and the equidistant cylindrical projection transformation formula is:
[0064]
[0065]
[0066]
[0067]
[0068] Among them, cols and rows represent the width and height of the image; is the equivalent projection dimension, λ is the equivalent projection longitude; f is the equivalent projection radius, determined by the camera lens calibration method; x src 、y src is the original image coordinate value.
[0069] 2. Intercept the overlooking area of the fisheye image after equiangular transformation;
[0070] 3. Carry out calibration operation with embodiment one;
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com