A novel large-span hybrid-driven unmanned underwater vehicle
An underwater vehicle and hybrid drive technology, applied to underwater ships, underwater operating equipment, motor vehicles, etc., can solve the problems of incompetence for long-range observation tasks, short working hours, and short distances, and improve stability And fast, powerful, long-range effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The following examples can enable those skilled in the art to understand the present invention more comprehensively, but the present invention is not limited to the scope of the described examples.
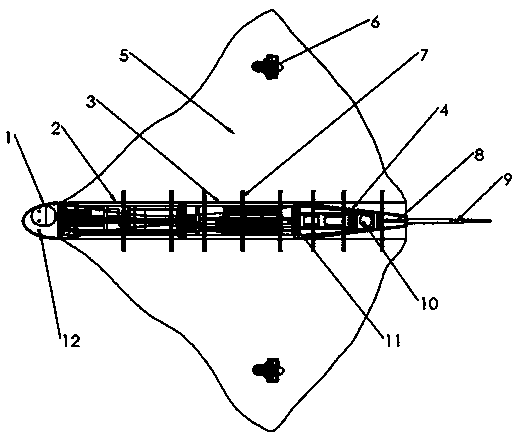
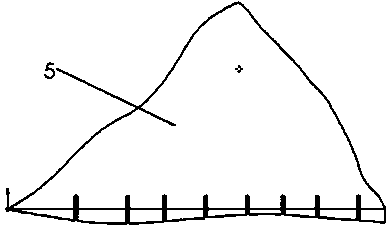
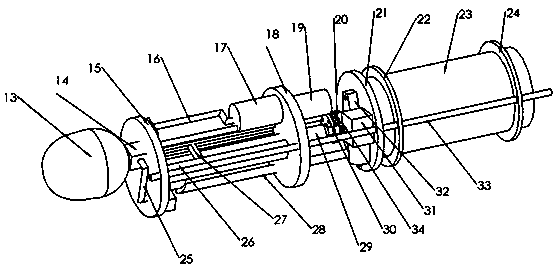
[0039] Such as Figure 1 to Figure 8 A new large-span hybrid drive unmanned underwater vehicle is shown, including the shell structure, large-span structure, antenna, hang gliding wing, propeller and empennage; the shell structure includes the first fairing, the middle buoyancy system cabin, middle pitching system cabin, and tail control system cabin; the large wingspan structure is set on both sides of the middle cabin, the antenna, hang glider and propeller are set on the rear side of the control system cabin, and the empennage is connected to the control system cabin shell.
[0040] The shell structure is provided with a buoyancy adjustment system, a pitch adjustment system, a control system, a load dumping device, a sensor and a communication antenna.
[0041] The shel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com