Output feedback control method and controller for heterogeneous sampling system based on switching principle
A non-uniform sampling and output feedback technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problem of long sampling period, uncertain refresh time and sampling interval, unavoidable delay, and random packet loss order and other problems, to achieve the effect of stable index and good effect of simulation examples
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
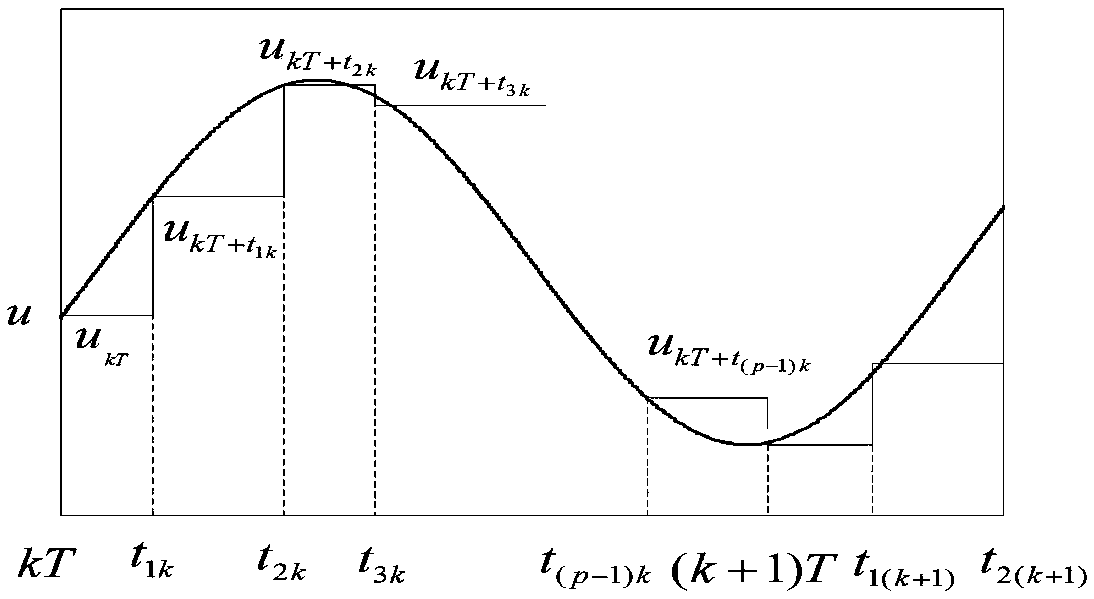
[0056] figure 1 The dynamic process of the non-uniform sampling system is given, where S c is a controlled object, its kT+t ik Receive the discrete input signal u(kT+t) generated by the computer at all times ik ), i=1,2,...,p, through the zero-order holder H Γ Generate a continuous signal u(t) as the plant S c input, output y (t) uniformly sampled with a period T, that is, within [kT,kT+T), y (t) = y (kT).
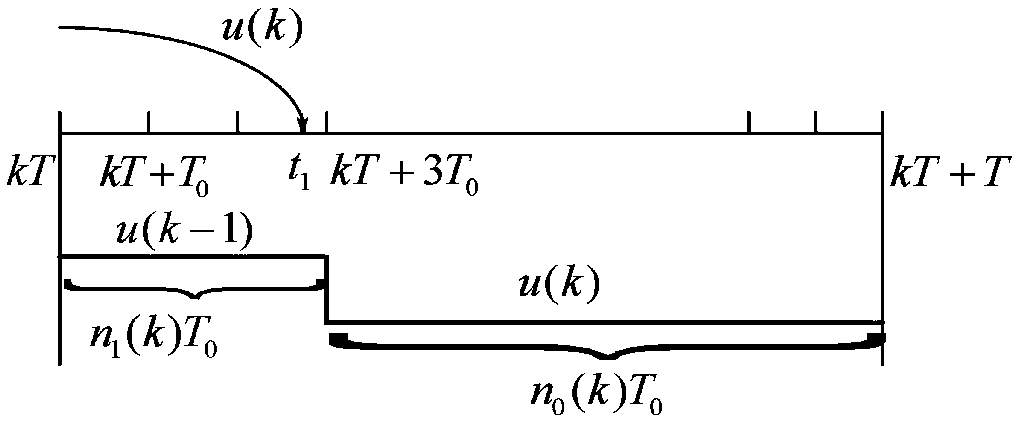
[0057] figure 2 Given the characteristics of the zero-order keeper, the refresh interval is τ ik (τ ik :=t ik -t (i-1)k ), t ik :=τ 1k +τ 2k +...+τ ik (let t 0k =0,t pk =T), T:=τ 1k +τ 2k +...+τ pk = t pk for the frame cycle. In the research, in the non-uniform sampling system, the refresh interval is time-varying and uncertain, then the input signal u(t) can be expressed as:
[0058]
[0059] According to the actual situation, some simplifications have been made to the above non-uniform sampling process:
[0060] 1) In the actual non-uniform sa...
Embodiment 2
[0090] Embodiment 2 Non-uniform sampling system stability analysis
[0091] Lemma: (The nature of Schur's complement) Given a symmetric matrix A>0, a symmetric matrix C>0, and a matrix B, then A+B T CB<0 is equivalent to
[0092] or
[0093]Theorem: Consider the closed-loop non-uniform sampling system (7), if there is a positive scalar λ (0 and So that the following inequalities and equations hold,
[0094]
[0095]
[0096]
[0097]
[0098] Then the system (7) is exponentially stable and has an exponential decay rate
[0099] Proof: Suppose k 1 , k 2 ,...,k i Indicates the switching point of σ(k) in the interval [0,k), satisfying 01 2 i
[0100]
[0101] The Lyapunov function is selected as follows,
[0102]
[0103] where P j >0,Q j >0 and S j >0, j ∈ F 0 , is an undetermined symmetric positive definite matrix. Consider V j (k) along the subsystem S cj Dynamic trajectory changes. From formula...
Embodiment 3
[0142] Embodiment 3 simulation example
[0143] Consider the following controlled objects:
[0144]
[0145] Take the sampling period as T=10ms, divide the sampling interval into ten equal parts, that is, let N=10, take the period T of reading data from the zero-order holder 0 = 1 ms. The controller is taken as
[0146]
[0147] The model of the closed-loop non-uniform sampling system can be described by formula (7). Assume that the maximum delay upper bound τ = 4T 0 =4ms, therefore, there are only five possible values of the input signal delay, that is, τ(k)∈{0,1,2,3,4}ms, and the system (7) contains at most five subsystems. Use these five subsystems with S ci , i=0,1,2,3,4 represent. S ci The system input matrix is given by n 1 (k) and n 0 (k) decides, and [n 1 (k)n 0 The five possible values of (k)] are [0 10], [1 9], [2 8], [3 7], [4 6]. define map[n 1 (k)n 0 (k)]→σ(k):
[0148] [0 10]→0, [1 9]→1, [2 8]→2, [3 7]→3, [4 6]→4
[0149] When delay τ(...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com