Torque Ripple Suppression Method of Permanent Magnet Synchronous Motor Based on Robust Iterative Learning Control
A permanent magnet synchronous motor, iterative learning control technology, applied in the direction of controlling generators, controlling electromechanical brakes, controlling electromechanical transmissions, etc., can solve problems such as external load disturbance and parameter perturbation, and achieve strong robustness weakening and improving. The effect of control performance, improving dynamic response performance and anti-disturbance performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0052] DETAILED DESCRIPTION OF THE PREFERRED EMBODIMENTS 1. The method for suppressing torque ripple of permanent magnet synchronous motor based on robust iterative learning control described in this embodiment is specifically implemented by the following steps:
[0053] 1. First, the state equation of the permanent magnet synchronous motor speed servo system is established as follows:
[0054]
[0055] In the formula, x(t) is the system state variable, u(t) is the control input, y(t) is the system output, f(x, t) is the unknown periodic function of the state variable x(t), and b is the Knowing the numerical coefficient, r(t) represents the total system disturbance (including system parameter disturbance and external load disturbance), and B(x,t) is the known friction torque function.
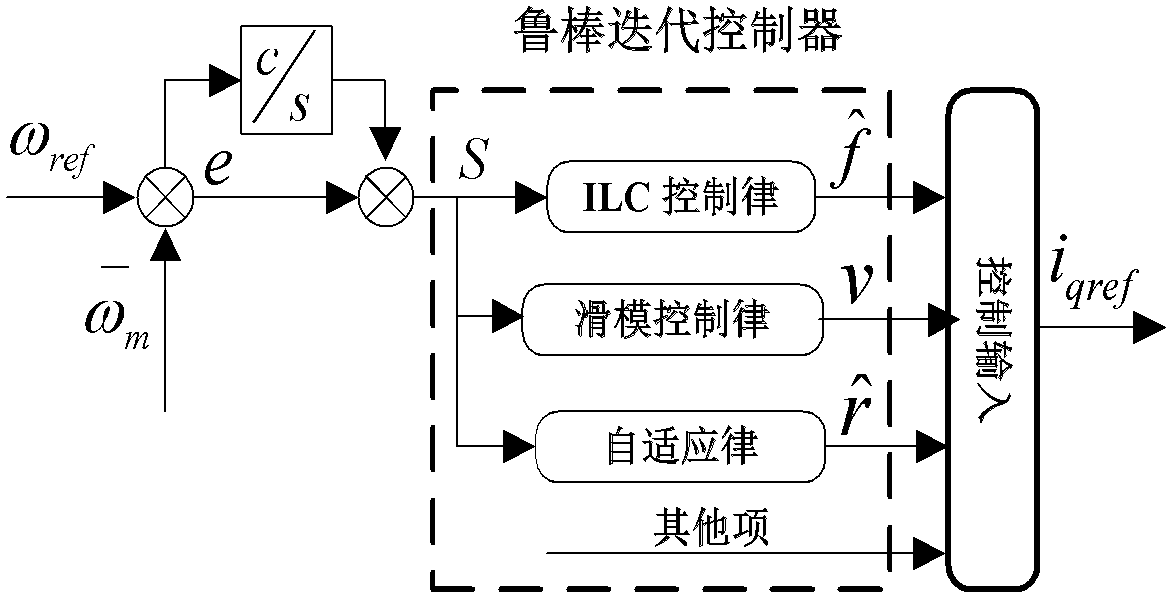
[0056] 2. Design a Robust Iterative Learning Controller
[0057] The velocity tracking error is:
[0058] e(t)=ω ref (t)-ω m (t)(2)
[0059] where ω ref (t) is the given speed signal, ...
specific Embodiment approach 2
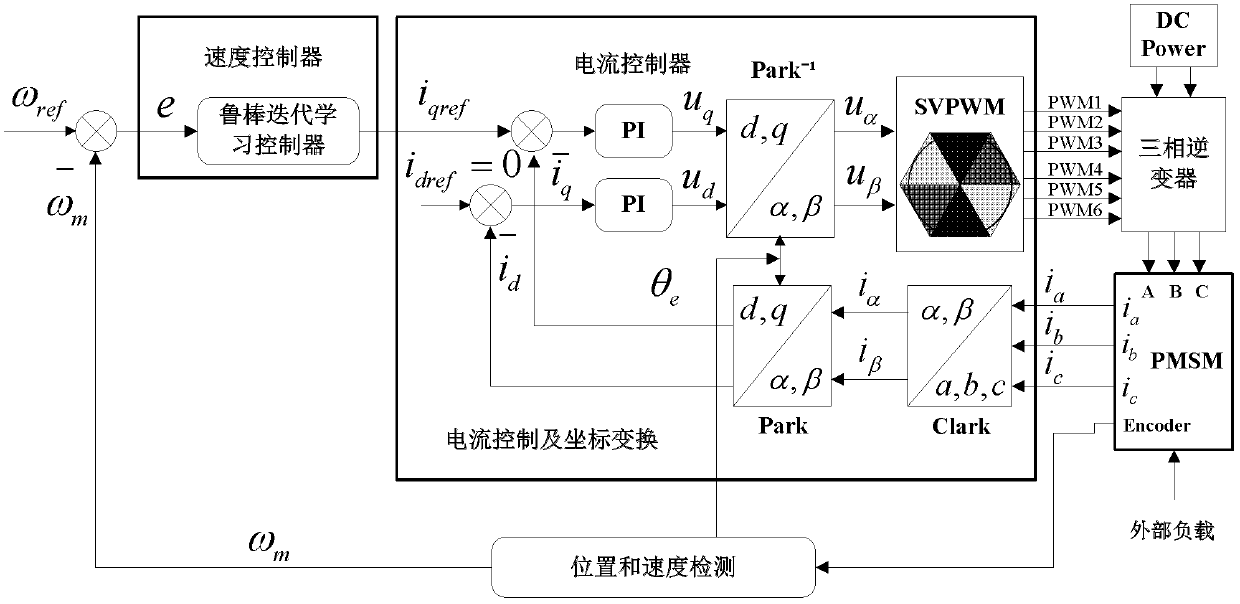
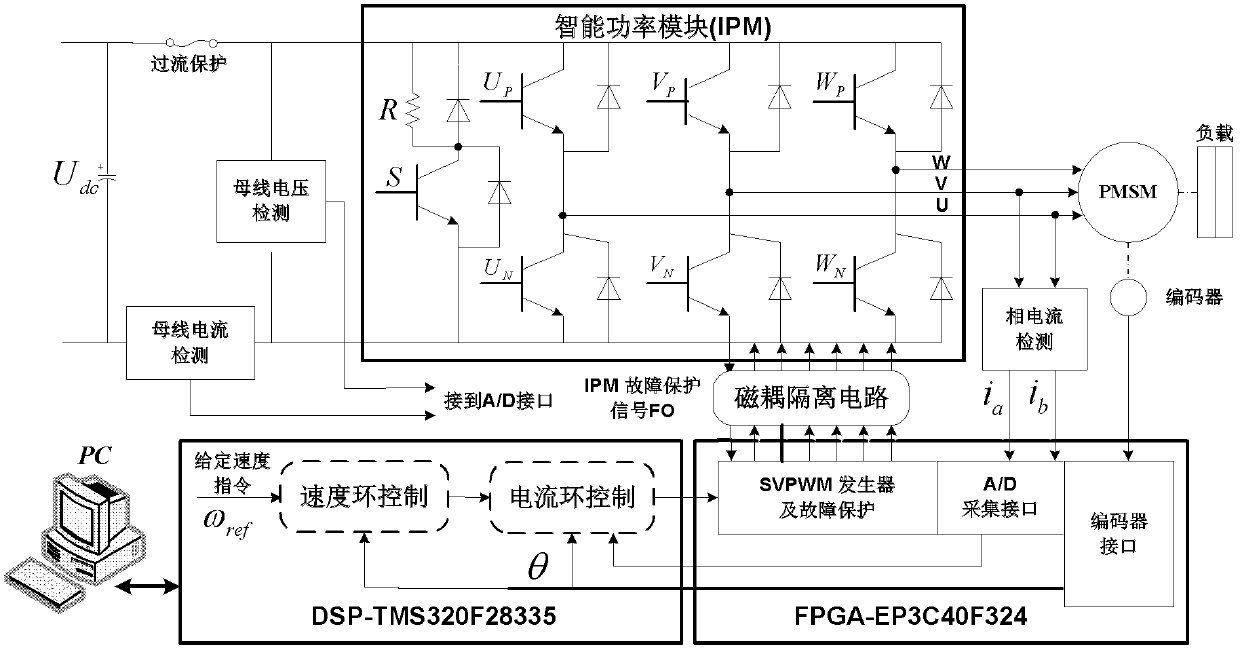
[0120] Specific embodiment 2. Combination Figure 1 to Figure 15 This embodiment is described, which is a specific example of the method for suppressing torque ripple of permanent magnet synchronous motor based on robust iterative learning control described in Embodiment 1:
[0121] combine figure 1 Describe this embodiment, figure 1It is a structural block diagram of the permanent magnet synchronous motor speed servo system based on robust iterative learning control, which consists of permanent magnet synchronous motor, three-phase inverter, space voltage vector pulse width modulation (SVPWM), position sensor, robust iterative learning control Controller (speed controller), current PI controller, coordinate transformation module. The robust iterative learning controller generates the q-axis current given value, the current PI controller generates the control voltage, and the SVPWM control strategy is used to control the on-off of the power device of the three-phase inverter...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com