


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Multifunctional five-axis gantry type integrated welding robot
A gantry-type, multi-functional technology, applied in the field of robotics, can solve the problems that the cutting range is difficult to reach 90 degrees, the three-dimensional space curve welding cannot be realized, the welding angle and cutting angle are limited, and it is easy to ensure positioning accuracy and repeat positioning High precision, realize large space high-precision welding operation, and the effect of smart and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
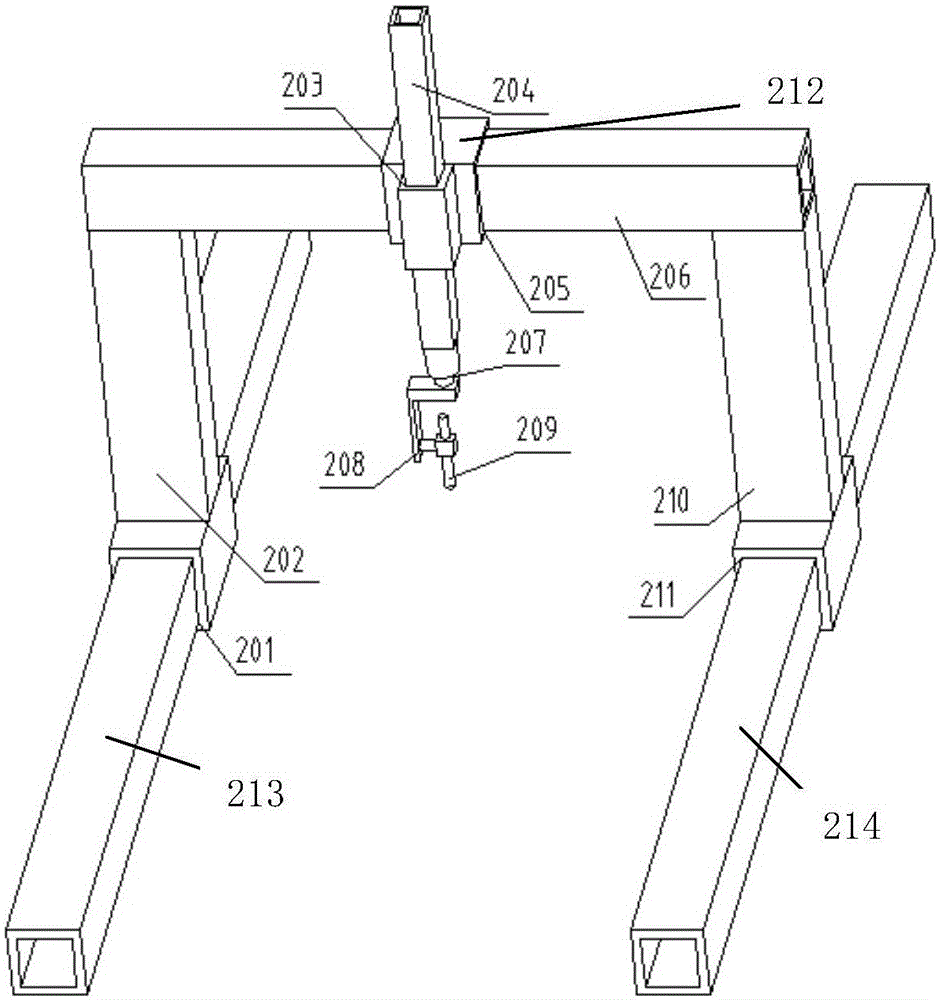
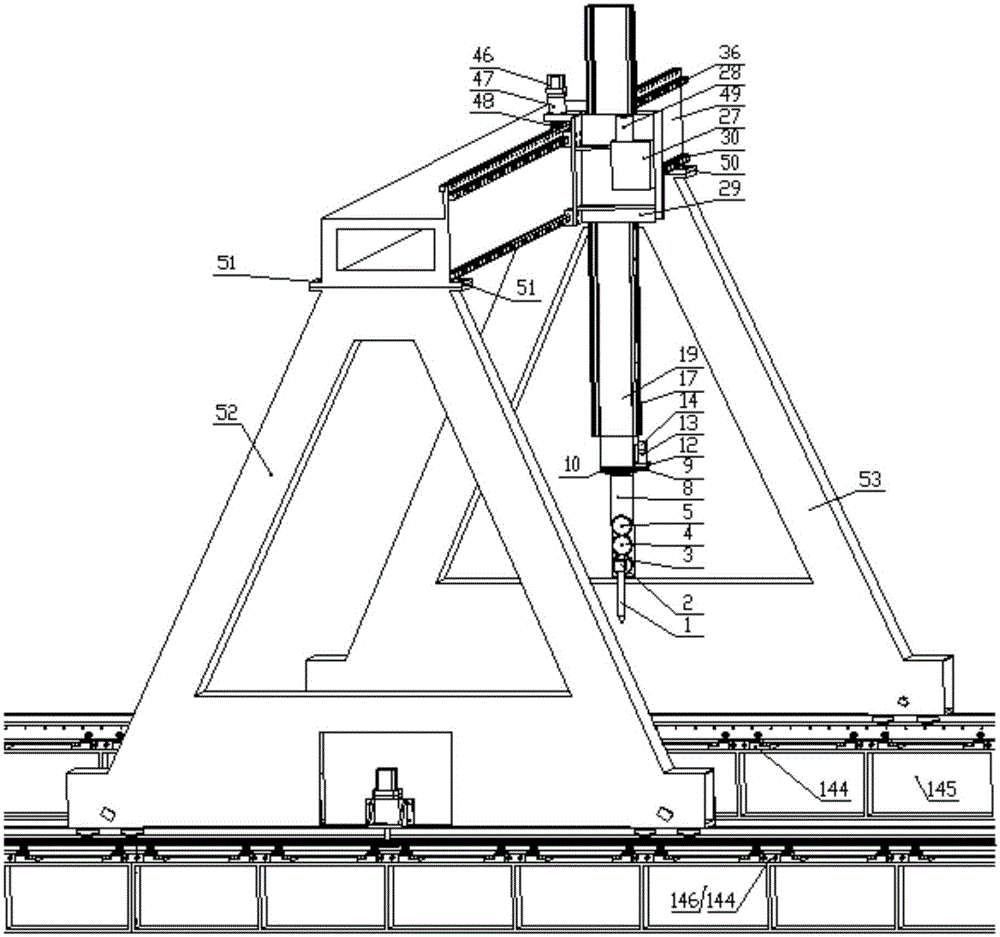
[0023]The present invention adopts a gantry structure. Firstly, lay steel pads on the ground, install rail adjustment mechanisms on the pad steel, and properly set the number and spacing of rail adjustment mechanisms according to actual conditions. The rails are installed on multiple sets of adjustment pads through bolts. The parallelism of the rails on both sides of the gantry frame in the horizontal plane is adjusted through multiple sets of adjustment mechanisms; the rails used for railways are processed so that the running wheels and clamping bearings installed on the outriggers can make line contact with the rails and clamp the rails , so that there are two degrees of freedom between the rail and the outrigger, but limited by the weight of the cutting robot, the walking wheels on the outrigger can only have one degree of freedom t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com