Point cloud data screening method and device, electronic equipment and storage medium
A point cloud data and screening method technology, applied in the computer field, can solve the problems of too little point cloud data, too much point cloud data, and the inability to realize fast display, etc., and achieve the effect of avoiding shape distortion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0028] figure 1 It is a flow chart of a point cloud data screening method provided by Embodiment 1 of the present invention. This embodiment is applicable to sampling the original point cloud of an object (for example, a large number of point clouds obtained through vehicle-mounted radar scanning), so as to achieve the original The scene where the point cloud is thinned out. The method can be executed by a device for screening point cloud data, and the device can be implemented by means of software and / or hardware.
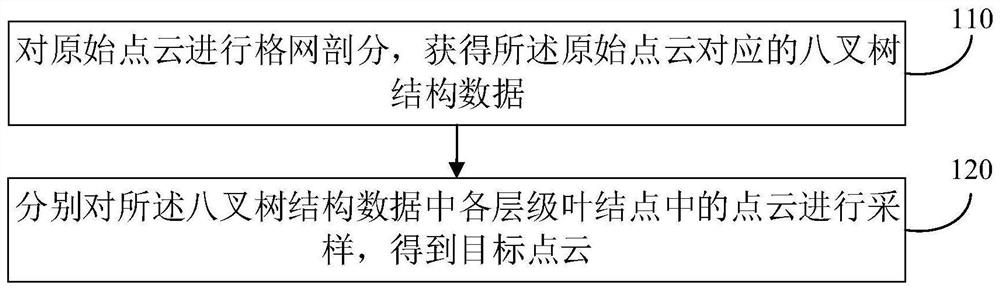
[0029] Such as figure 1 As shown, the method specifically includes the following steps:
[0030] Step 110, perform grid division on the original point cloud, and obtain octree structure data corresponding to the original point cloud.
[0031] Wherein, the original point cloud usually refers to the point cloud obtained by scanning by the vehicle radar. Because the point cloud obtained by vehicle-mounted radar scanning has rich details, complex structure, and hu...
Embodiment 2
[0049] image 3 It is a flow chart of a method for screening point cloud data provided by Embodiment 2 of the present invention. On the basis of the above embodiments, this embodiment, for step 120 "respectively select the leaf nodes of each level in the octree structure data Sampling the point cloud to get the target point cloud" is described in detail. The explanations of terms that are the same as or corresponding to those in the foregoing embodiments are not repeated here.
[0050] see image 3 The point cloud data screening method provided in this embodiment specifically includes the following steps:
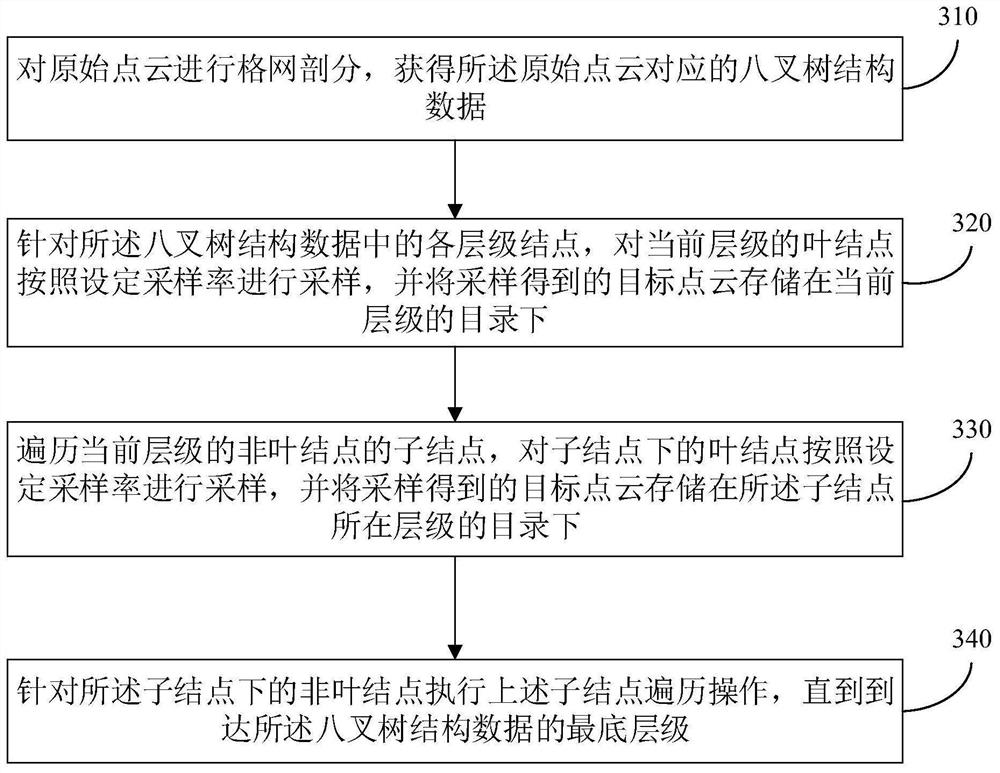
[0051] Step 310, perform grid division on the original point cloud, and obtain octree structure data corresponding to the original point cloud.
[0052] Step 320 , for each level node in the octree structure data, sample the leaf nodes of the current level according to the set sampling rate, and store the sampled target point cloud in the directory of the current level. ...
Embodiment 3
[0072] Figure 4 It is a flow chart of a point cloud data screening method provided by Embodiment 3 of the present invention. On the basis of the above embodiments, this embodiment applies the high-resolution target point cloud of the original point cloud to the automatic driving simulation platform. In order to enable the automatic driving simulation platform to realize the purpose of fast and smooth display of point clouds, so as to meet the real-time requirements of automatic driving. The explanations of terms that are the same as or corresponding to those in the foregoing embodiments are not repeated here.
[0073] Such as Figure 4 As shown, the method includes the following steps:
[0074]Step 410: Carry out grid division on the original point cloud, obtain the octree structure data corresponding to the original point cloud, and establish the data index structure of the octree structure data at the same time.
[0075] Step 420: Sampling the point clouds in the leaf no...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com