Active shared projection plane sensing system and method for desktop cluster robots
A perception system and robot technology, applied in the direction of using projection device image reproducer, instrument, picture duplicator, etc., can solve the problems of difficult sudden factors, insufficient fault tolerance of central control method, etc., and achieve the effect of improving portability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
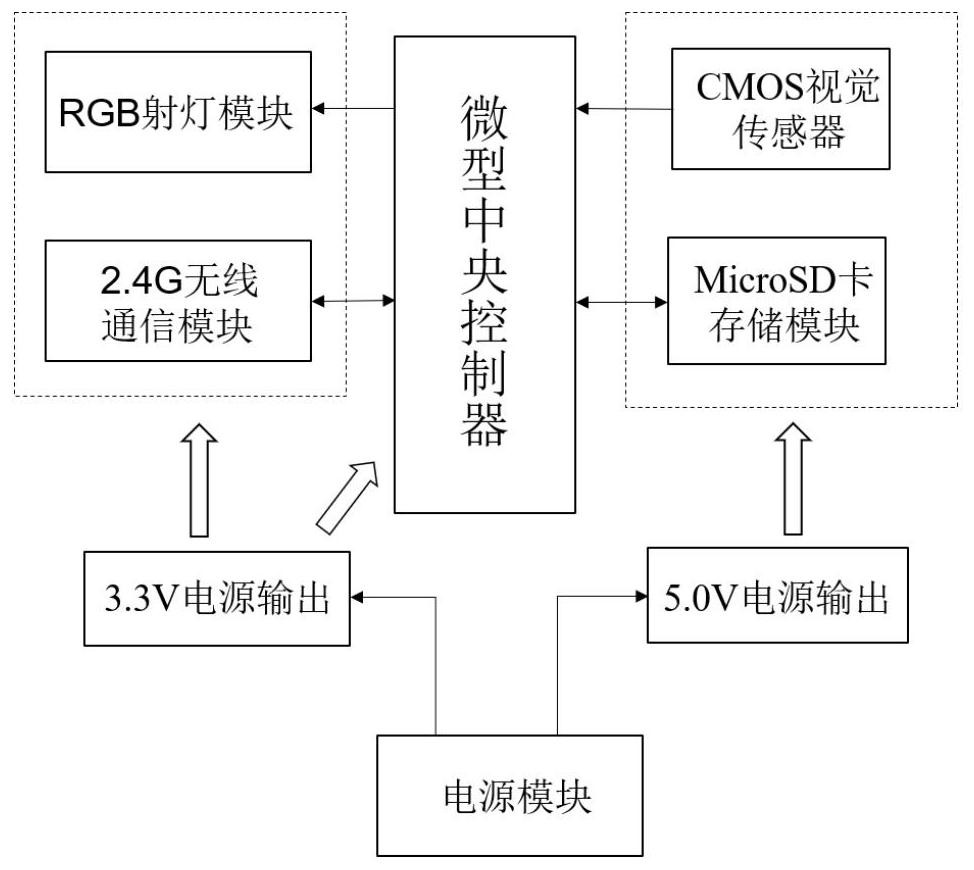
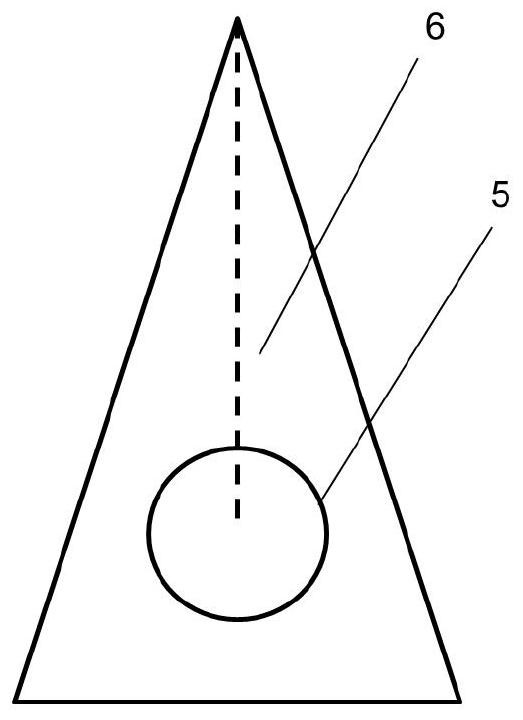
[0062] figure 1 It is the structural diagram of the active shared projection surface perception system of desktop cluster robots. The system includes CMOS visual sensor module, RGB spotlight module, micro processing unit, MicroSD card storage module, 2.4g wireless communication module, and power supply module. The CMOS vision sensor module adopts OV2640. OV2640 is a 1 / 4 inch CMOS UXGA (1632*1232) image sensor with a maximum frame rate of 15 frames per second. It exchanges data with the micro CPU through the DCMI interface. The RGB spotlight module is composed of RGB spotlights and a marked transparent plate. The outer contour of the sign is composed of an isosceles triangle with a height-to-base ratio of 3:2. Inside, a circle is placed at the centroid of the isosceles triangle. The RGB spotlight module Different colors of are used to represent different types of individuals. The micro processing unit adopts the Embedded chip as the core, the operating frequency is up to 480...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com