


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Diving section FENLCS large squint high-resolution imaging method and system based on sphere model
An imaging method and a technology of the subduction section, which are applied in the field of signal processing, can solve difficult problems, and the processing accuracy cannot reach high-resolution imaging, so as to achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
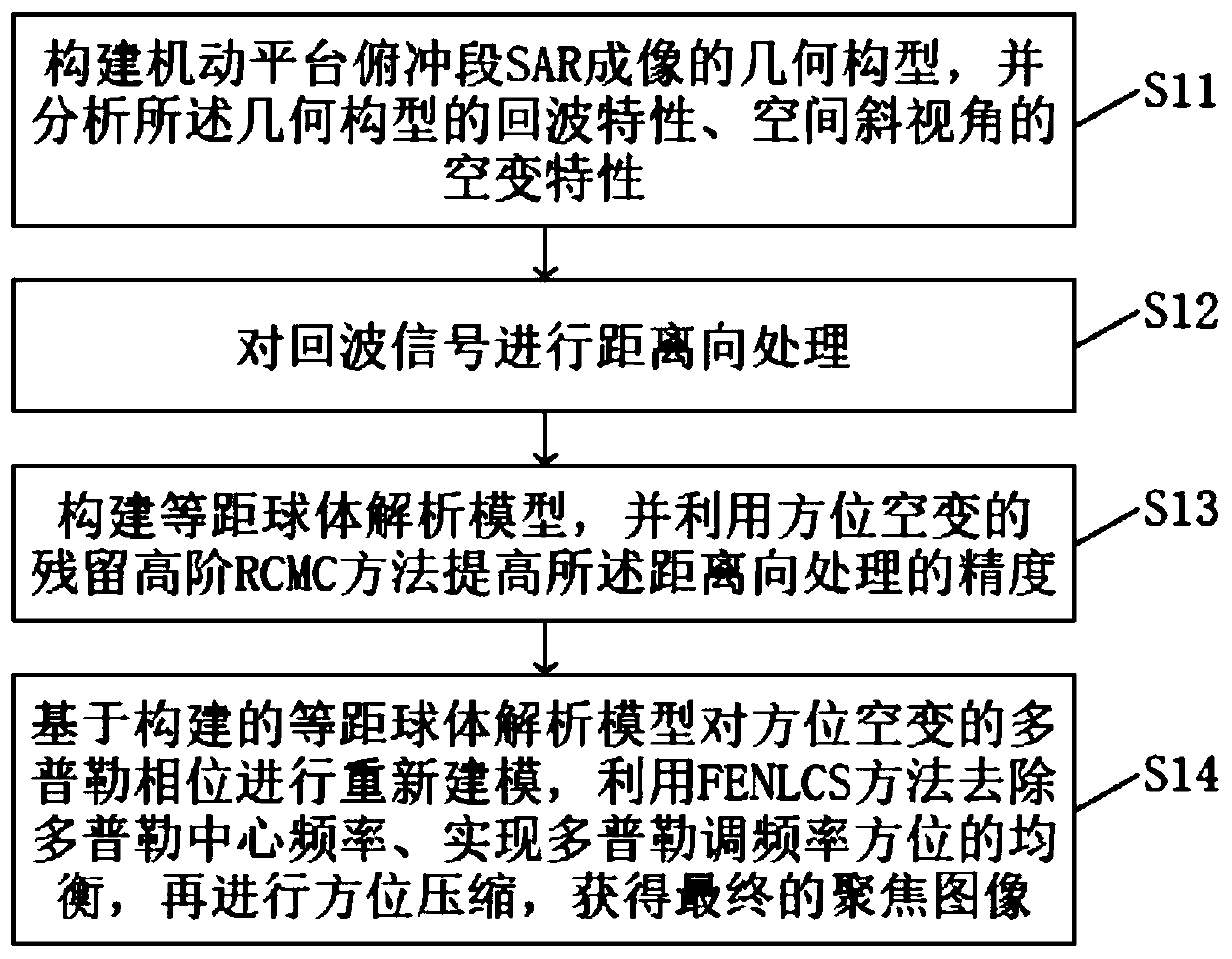
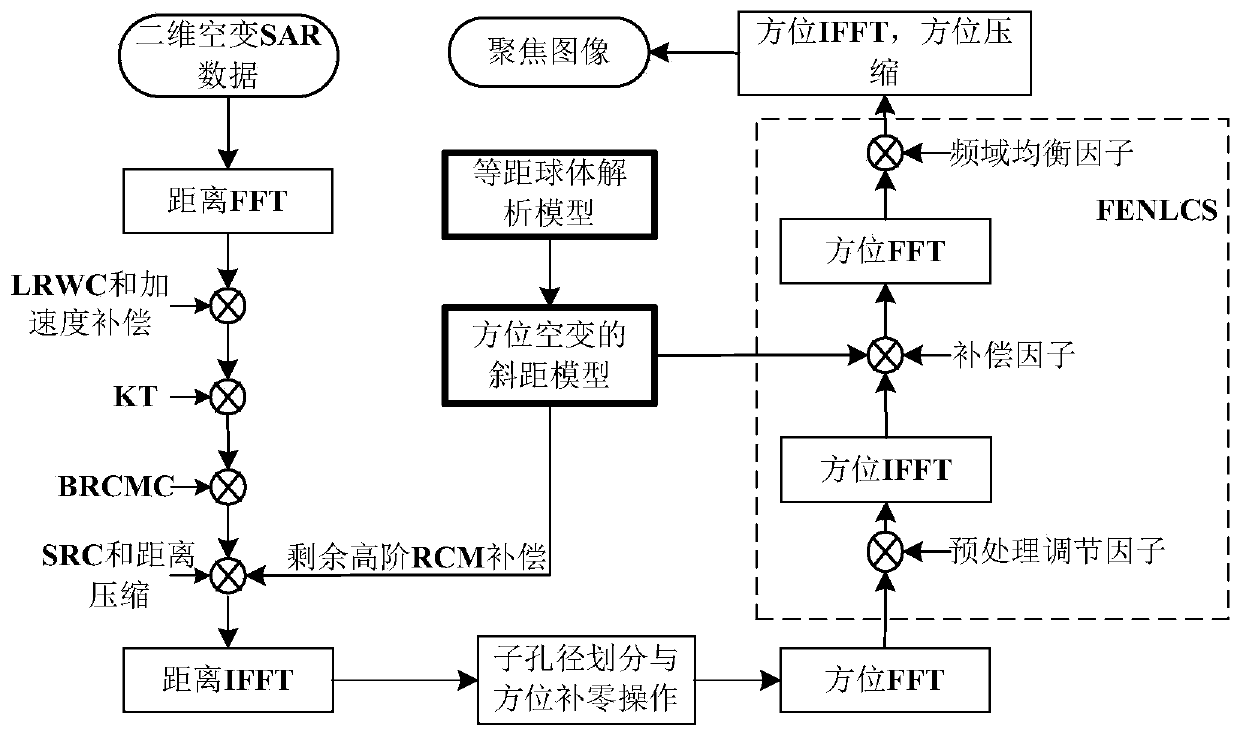
[0043] This embodiment provides a high-resolution imaging method of FENLCS high squint in the subduction section based on the sphere model, such as Figure 1-2 shown, including:
[0044] S11. Construct the geometric configuration of the SAR imaging in the subduction section of the maneuvering platform, and analyze the echo characteristics of the geometric configuration and the spatial variation characteristics of the spatial oblique angle of view;
[0045] S12. Perform range-wise processing on the echo signal;
[0046] S13. Constructing an equidistant sphere analytical model, and utilizing the residual high-order RCMC method of azimuth space variation to improve the accuracy of the range-wise processing;
[0047] S14. Based on the constructed equidistant sphere analytical model, remodel the Doppler phase of azimuth space variation, use the FENLCS method to remove the Doppler center frequency, realize the balance of Doppler modulation frequency and azimuth, and then perform az...
Embodiment 2
[0165] The difference between the high-resolution high-resolution imaging method of FENLCS in the subduction section based on the sphere model disclosed in this embodiment and the first embodiment is that:
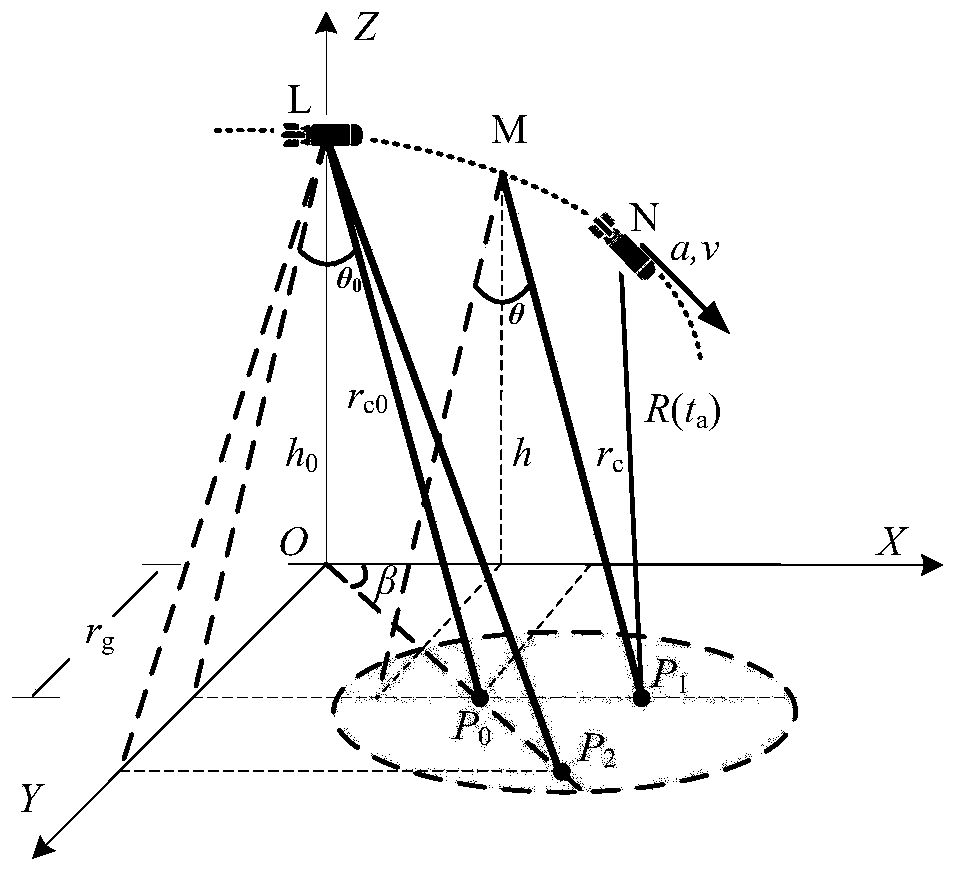
[0166] figure 2 is the geometric configuration of the SAR in the dive segment of the maneuvering platform, in which the radar platform performs a curved acceleration motion along the LMN trajectory. In this dive imaging configuration, the radar platform performs a curved dive motion under the influence of acceleration, and the instantaneous three-dimensional velocity and three-dimensional acceleration of the radar platform are v and a respectively. Slow time t in azimuth a = 0 moment, the motorized platform is located at point L, and its height is h 0 , the center of the beam just irradiates the center point P of the scene 0 , the central slope distance is r c0 , point P 0 The distance from the projection on the ground to the Y axis is r g .
[0167] Table 2 shows ...
Embodiment 3
[0180] This embodiment provides a FENLCS high-squint high-resolution imaging system based on a sphere model, including:
[0181] The first building block is used to construct the geometric configuration of the SAR imaging in the subduction section of the maneuvering platform, and analyze the echo characteristics of the geometric configuration and the spatial variation characteristics of the spatial oblique angle of view;
[0182] a first processing module, configured to perform range-wise processing on the echo signal;
[0183] The second building block is used to construct an equidistant sphere analytical model, and utilizes a residual high-order RCMC method of azimuth space variation to improve the accuracy of the range-wise processing;
[0184] The second processing module is used to remodel the Doppler phase of azimuth space variation based on the equidistant sphere analytical model, use the FENLCS method to remove the Doppler center frequency, realize the balance of Doppl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com