Hand posture estimation system and method based on RGBD fusion network
A pose estimation, fusion network technology, applied in the field of computer vision and deep learning, can solve the problems of time-consuming, complex 3D data conversion process, unknown generalization ability of other objects, etc., to achieve high efficiency, good applicability, good generalization The effect of sexual ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0062] Such as figure 1 As shown, the present invention provides a hand posture estimation system based on RGBD fusion network, comprising:
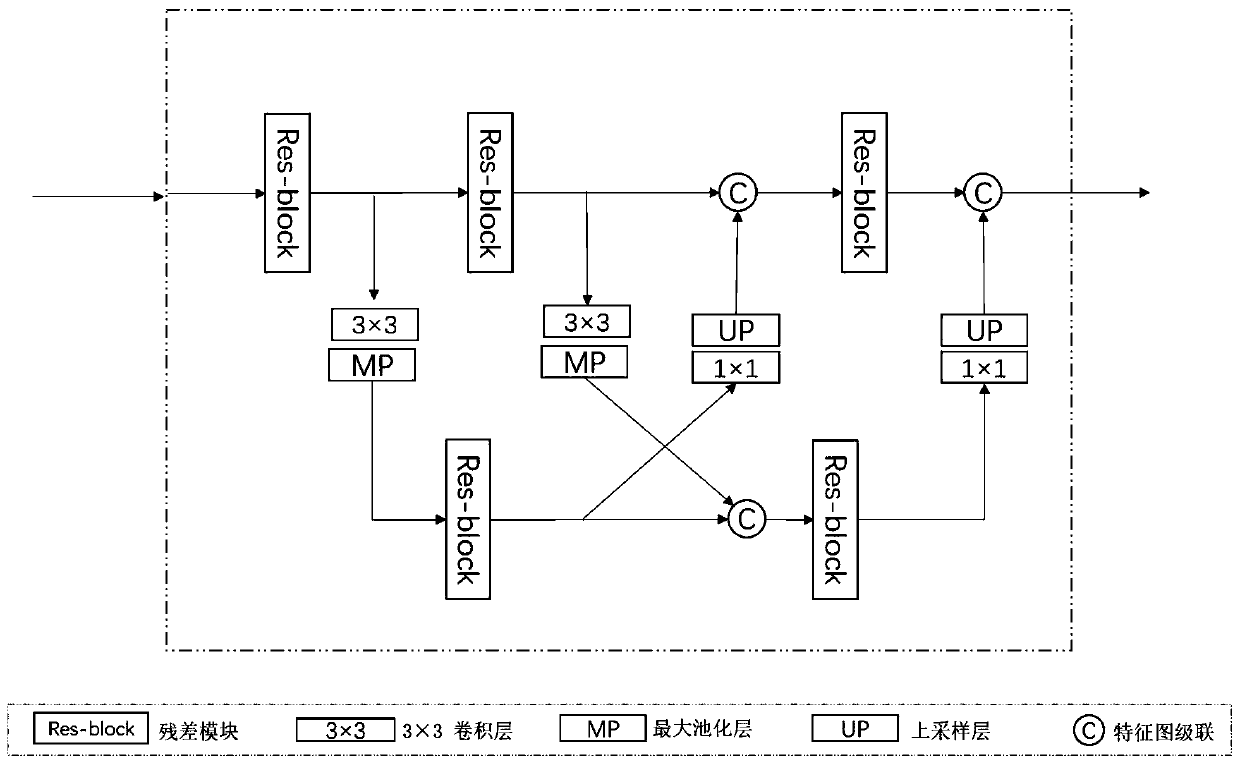
[0063] Global deep feature extraction modules such as image 3 As shown, a parallel two-way cross-fusion residual network is used. The upper road is a high-resolution feature map, and the lower road is a low-resolution feature map. Multi-scale feature fusion is performed by cross-fusion of multi-resolution information, and finally in The high-resolution feature map predicts the network output; the global deep feature extraction module uses fewer residual blocks to ensure the extraction of low-level features. The residual block compares the original input information pixel by pixel with the features processed by the subsequent network add. Most of the existing networks have a serial structure, that is, the feature map is reduced from high resolution to low resolution and then restored from low resolution to high resolution. The resoluti...
Embodiment 2
[0069] The invention provides a hand posture estimation method based on RGBD fusion network, comprising:
[0070] Step 1: Prepare the dataset;
[0071] Step 11: obtain image data set; Described image data set comprises color image and depth image; In the present embodiment, select the FAHD data set of open source sharing, this data set is the data set of the task-oriented operation that Imperial College of Technology establishes, with The first-person perspective captures the daily actions of manipulating objects, and provides 3D position annotations of 21 joint points. The image data uses Realsense SR300 to collect 45 kinds of daily actions interacting with 26 kinds of objects in the three environments of kitchen, social life and work from the first-person perspective, such as pouring milk, opening a bottle, writing, etc., through the magnetic sensor system attached to the hand Automatic labeling. This dataset provides color images corresponding to depth images, totaling 10...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com