A control method using SEMG to control the stiffness of ankle joint rehabilitation equipment
A technology of rehabilitation equipment and control methods, applied in the fields of application, passive exercise equipment, medical science, etc., can solve problems such as ankle joint dysfunction, affecting walking function, joint instability, etc., and achieve the effect of high efficiency and simple method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
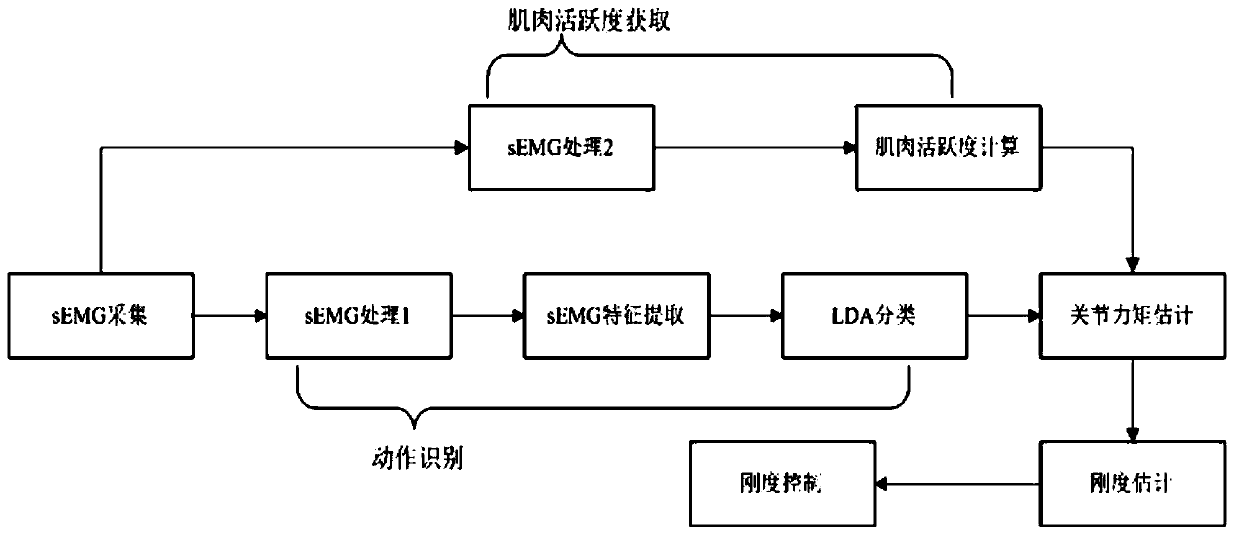
[0062] Such as figure 1 Shown is the flow chart of the control method of the present invention.
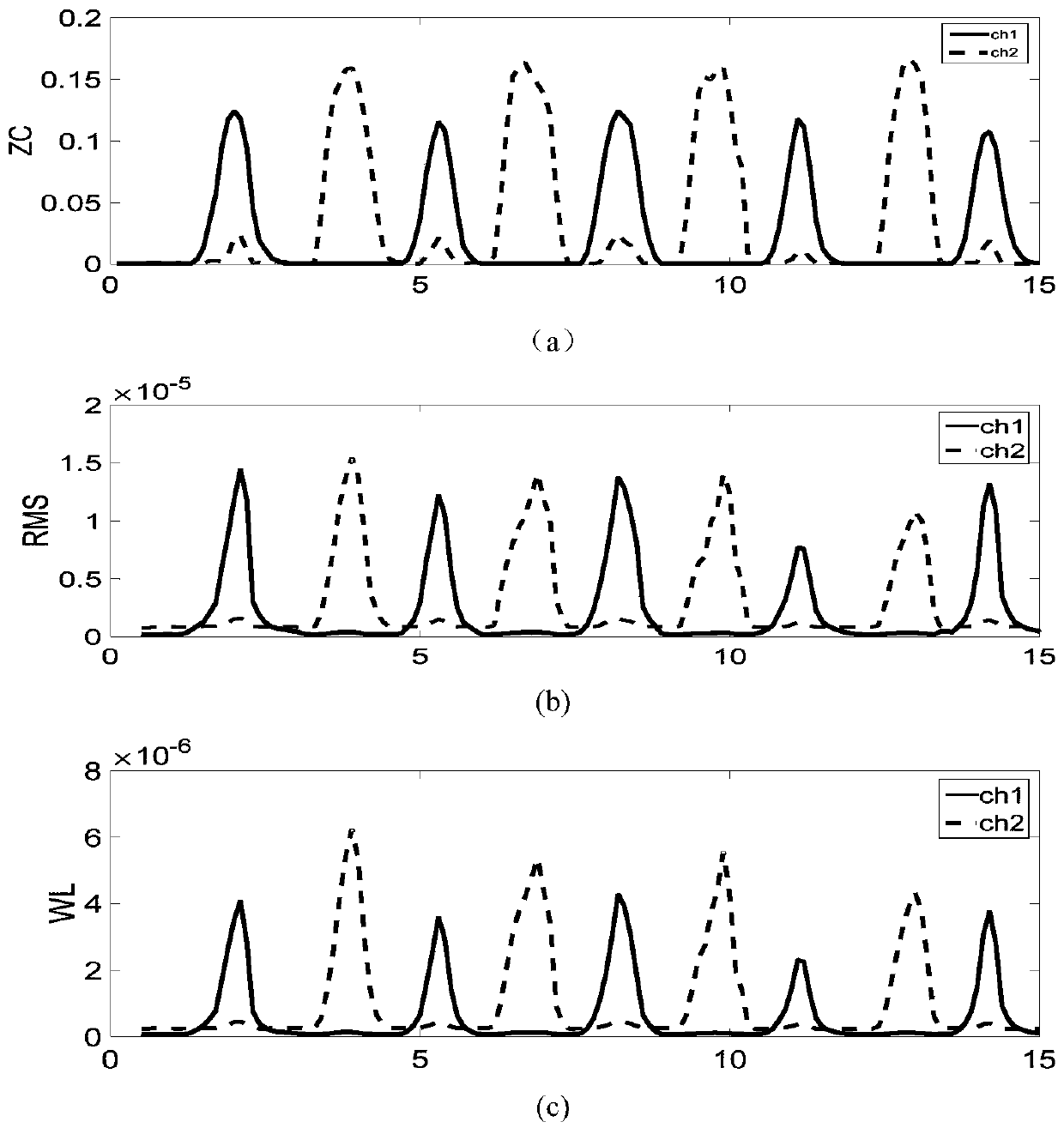
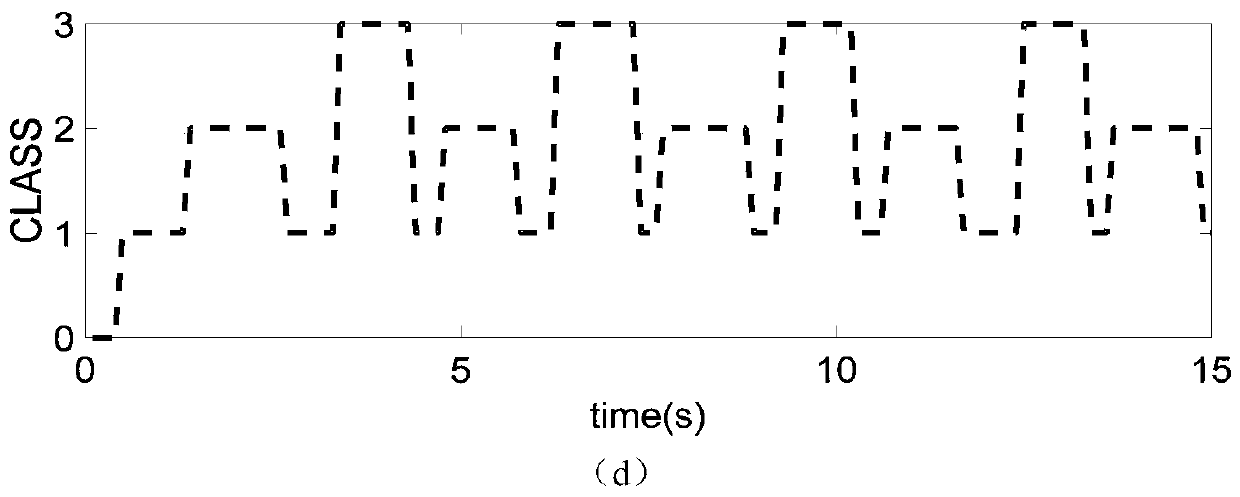
[0063] The sEMG signals of the tibialis anterior muscle and gastrocnemius muscle most related to ankle joint movement were collected and processed, including high-pass filtering and low-pass filtering. The filters were Butterworth filters with cut-off frequencies of 190 Hz and 50 Hz, respectively. Feature extraction is performed on the filtered sEMG signals of the two channels, and the feature values extracted by each channel are: zero crossing times (ZC), root mean square (RMS), and waveform length (WL). The method is as follows:
[0064] where|x i -x i+1 |>ε
[0065] The introduction of ε is to prevent small-value noise, and ZC can roughly represent the signal frequency.
[0066]
[0067] RMS is a measure of signal energy.
[0068] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com