Self-adaptive stable equilibrium control method, self-adaptive stable equilibrium control system and biped humanoid robot
A humanoid robot, stable and balanced technology, applied in the field of robotics, can solve problems such as the control of nonlinear changes that are not suitable for complex biped humanoid robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
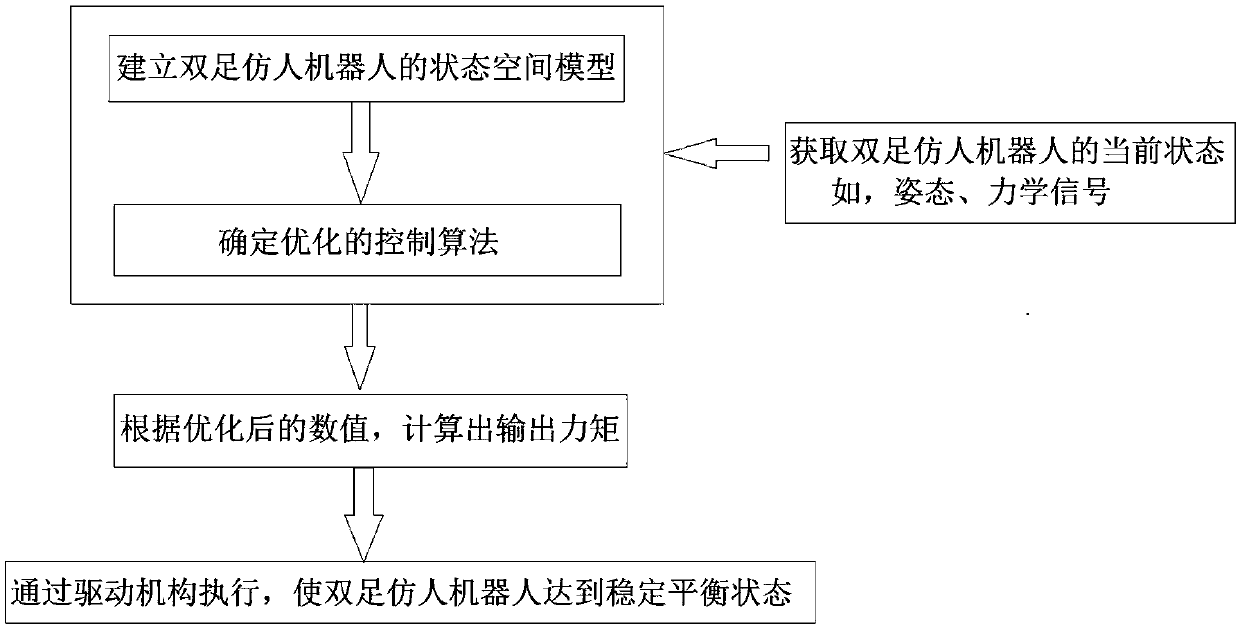
[0065] Such as figure 1 As shown, this embodiment provides an adaptive stable balance control method for enabling a biped humanoid robot to adapt to stable balance, which includes the following steps:
[0066] Step 1. Establish the state space model of the biped humanoid robot as follows:
[0067]
[0068] Y=C×X;
[0069] Wherein, X is the state function of the biped humanoid robot (that is, a function that can reflect the state of the biped robot system, such as the angle of each joint of the biped humanoid robot mentioned in Embodiment 2, or the biped humanoid robot The displacement of the limbs of the robot, etc. can be); Y is an output function, reflecting a certain attribute of the state of the biped humanoid robot, such as the joint angle reflecting the state of the biped humanoid robot; U is an input function, reflecting the state of the biped humanoid robot The control input of the current state of the robot, such as input torque; A is the state matrix of the bipe...
Embodiment 2
[0078] Preferably, this embodiment provides an adaptive stable balance control method. Compared with Embodiment 1, this embodiment further performs the following design:
[0079] The adaptive stable balance method in this embodiment aims at the multi-joint characteristics of the biped humanoid robot, abstracts each joint and joint angle of the robot, and establishes a basic state space model of the system.
[0080] Here, the biped humanoid robot is set to include N joints; the state function of the biped humanoid robot embodies the angle θ and angular velocity ω of each of the joints; the input function embodies the angular acceleration of each of the joints
[0081] Determine the angles corresponding to each joint of the biped humanoid robot, respectively: θ 1 , θ 2 ,...,θ N ;
[0082] Vector x = {θ 1 , θ 2 ,…, θ N} represents the angular position of each joint in the biped humanoid robot system;
[0083] Delta(x)=dx / dt={ω 1 , ω 2 ,...,ω N} represents the angular ...
Embodiment 3
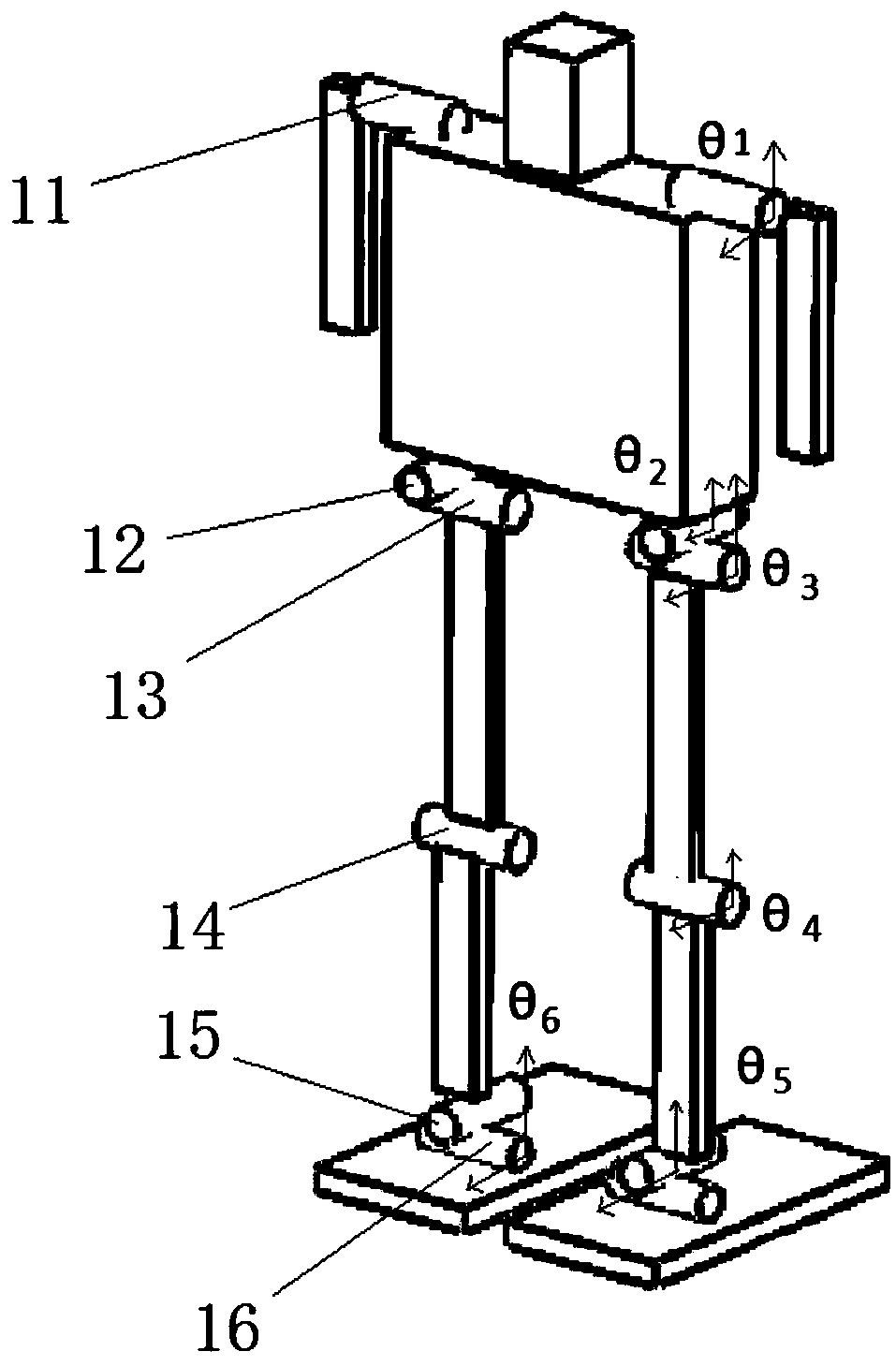
[0094] Preferably, this embodiment provides an adaptive stable balance control method. Compared with Embodiment 2, this embodiment mainly obtains the states of the 6 joints of the biped humanoid robot; image 3 As shown, from top to bottom are shoulder joint 11, hip joint 12, hip joint 13, knee joint 14, left and right ankle joints 15, front and rear ankle joints 16; express. The robot has 6 degrees of freedom, assuming that the bottom surface has sufficient friction and no horizontal sliding occurs.
[0095] In this embodiment, the biped humanoid machine space state function X:
[0096]
[0097] The state space model of the biped humanoid robot is:
[0098]
[0099]
[0100]Using the Jacobian matrix solution method, the coefficient matrices A, B, and C are determined as:
[0101]
[0102]
[0103]
[0104] Among them, the controller parameter K is:
[0105]
[0106] The self-adaptive stable balance control method provided in this embodiment obtains th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com