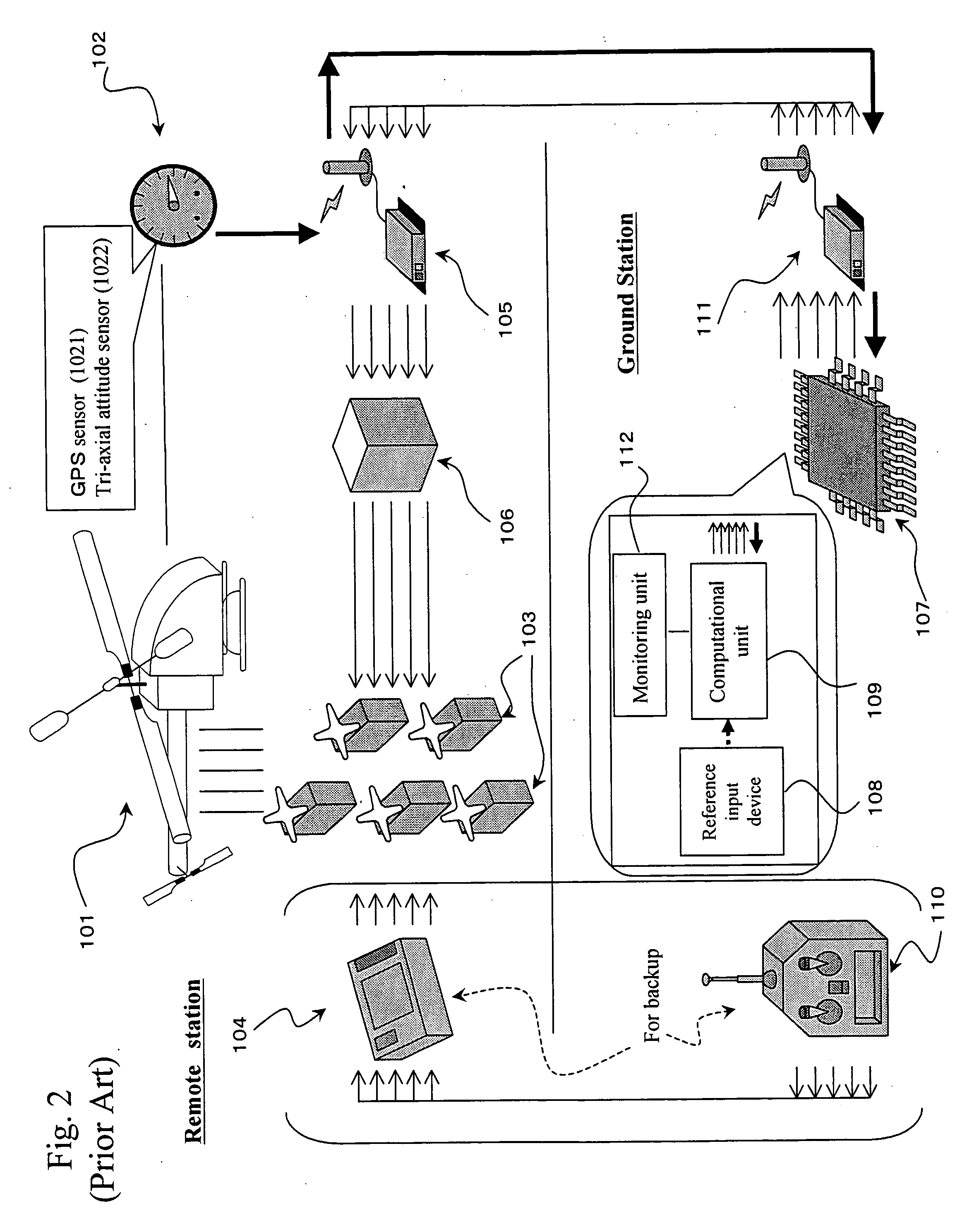
Although the aforementioned sensors and computational unit for the aforementioned conventional autonomous control system are large and heavy, the helicopter can adequately fly even when carrying these items.
Therefore, such a helicopter cannot easily be carried.
In addition, in order to use the system, the helicopter must have a flight range sufficiently larger than the actual helicopter, which limits the range over which the helicopter can be deployed.
In some cases, manned helicopter operations involve a narrow space in which the aforementioned conventional helicopter cannot negotiate.
Although the above problem can be solved by effecting autonomous control in such a helicopter, the smaller the weight of a helicopter, the more difficult it is to control.
In other words, the autonomous control system is subject to stringent constraints in terms of size and weight, and small helicopters tend to be unstable in terms of dynamical properties.
Therefore, with the aforementioned conventional autonomous control system, it is impossible to
mount the autonomous control system on the aforementioned small unmanned helicopter as is.
Further, applying the autonomous control algorithms for the aforementioned conventional autonomous control system to the aforementioned small unmanned helicopter as is does not guarantee adequate control performance.
Further, the calculation of a control instruction value is a time-consuming process due to the large number of computational steps involved in the determination of servo
motor control reference values; consequently, when one attempts to achieve size reductions in the autonomous control system, one must contend with the conflicting requirements of accommodating a large number of computational steps and the stringent constraints imposed on the capabilities of the computational equipment and the size of the control program.
Further, beyond the computational equipment, the sensors are also subject to stringent constraints on size and weight, which clearly adds difficulties to the construction of small and lightweight autonomous control systems.
In such a case, it is impossible to detect the relative distance between the helicopter and the ground in real-time.
Specifically, netechnologies he ground, compared with its behavior in the
sky, the helicopter tends to be unstable in terms of orientation dynamic characteristics.
Therefore, without a ground altitude sensor, it is impossible to smoothly control the helicopter's altitude so that its distance from the ground will remain constant or to perform
automatic landing / take-off controls involving lifting off from the ground or descending to the ground.
In such a case, if the
wireless communications are
cut off for any reason, the logical structure of the control system would collapse, which would not be desirable from the standpoint of safety during
flight operations.
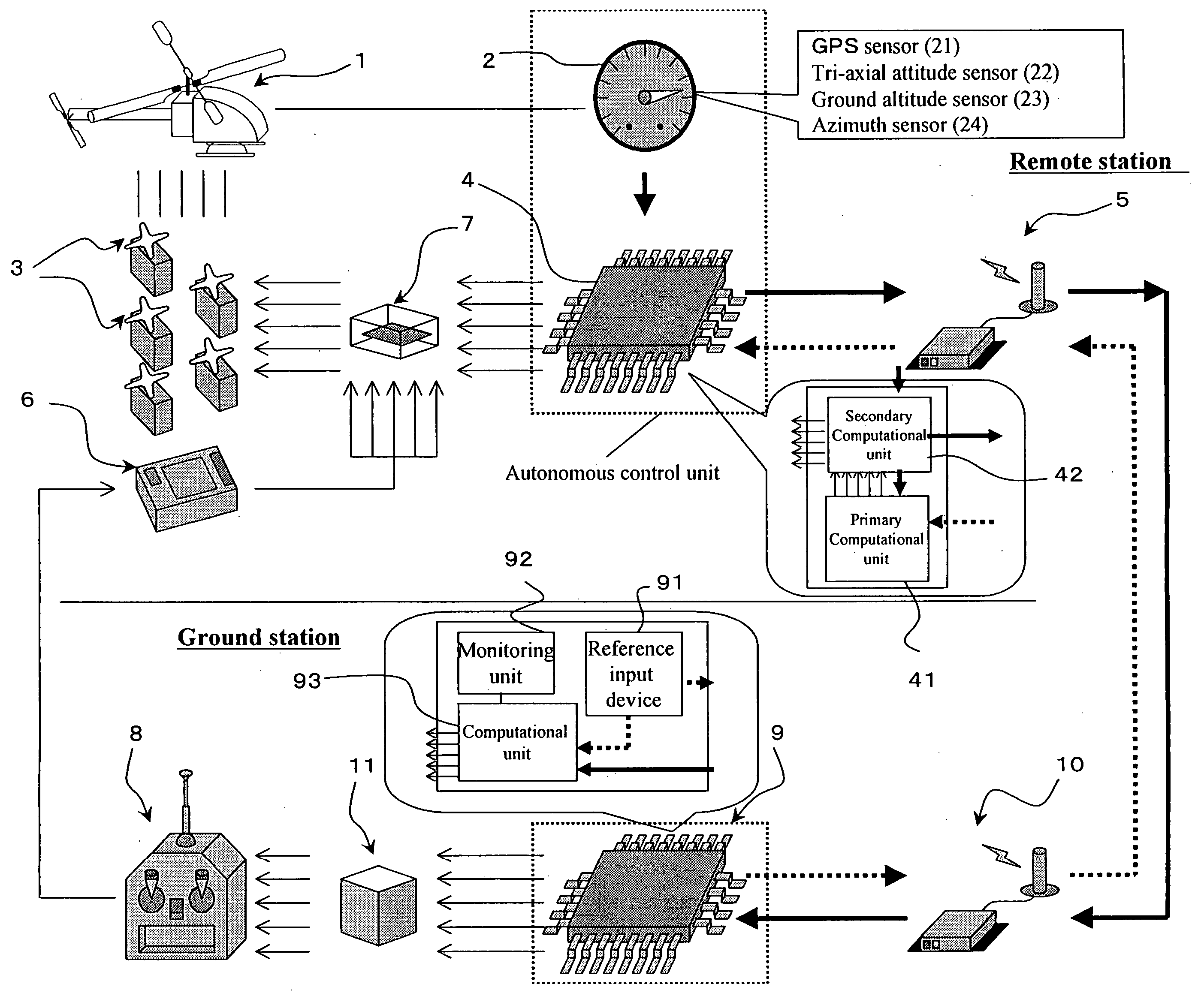
Although the use of complex algorithms may be required as autonomous control algorithms, in such a case, it would be fortuitous if a sophisticated computer provided on the
ground station can be used in conjunction with the aforementioned computational unit.
However, there have not been cases where autonomous control systems that permit the
combined use of a computational unit built into an autonomous control system and a computer on the
ground station for autonomous
control algorithm computation purposes have been developed.
However, no switching devices have been developed that specifically address the aforementioned servo motor for hobby-type products.
However, the aforementioned manual operation
transmitter can only accept the aforementioned external operation signals that are encoded in pulse format.
However,
no conversion equipment that can be directly connected to the aforementioned ground
station computer have been developed.
However, physically
cutting off the
signal line in order to sever manual operation signals would completely disable manual operation.
However, there have been no examples of switching units being developed for switching the aforementioned servo motors as hobby-oriented products.
Whereas the conventional unmanned helicopter provides a similar switching function internally in a system that is mounted on the helicopter, employing similar means in the present invention would result in disadvantages in terms of the safety and reliability of the autonomous small unmanned helicopter and the compatibility with the hobby-oriented radio-controlled helicopter.
However, there have been no cases of developing devices or
software capable of mixing manual operation signals and autonomous control signals in any proportion in this manner.
If the power for the system is stopped during the flight, drive signals could not be output to the aforementioned servo motors, even if the power is being supplied to other units, such as the aforementioned autonomous
control unit, the aforementioned manual operation
receiver, or the aforementioned servo motors, with result that the crashing of the helicopter would be unavoidable, leading to a potentially
fatal accident.
However, an increase in the number of batteries can lead to
human error, such as overlooking a dead battery, forgetting to turn on the power supply switch, or wiring errors due to increased wiring complexity.
Flying the helicopter under such conditions can directly result in an accident.
In other words, the safety and reliability necessary for practical operations could not be assured.
Since the aforementioned servo pulse mixing / switching unit is a key unit in the operation system for the aforementioned small unmanned helicopter, if the operation of this unit stops during the flight, the crashing of the helicopter will be unavoidable, potentially leading to a
fatal accident.
However, there have been no examples of cases of development of an autonomous small unmanned helicopter capable of supporting manual operation without an autonomous control system.
However, in some cases, the process of designing an autonomous
control algorithm may require the measurement of manual operation signals.
In such a case, the use of characterization input alone can cause a significant tilt in the attitude of the aforementioned small unmanned helicopter or a sudden acceleration, potentially leading to an accident.
However, the dynamic characteristics of a helicopter are subject to a complex interplay of dynamic action and fluid dynamic action, which makes analysis an extremely difficult task.
In addition, there have been no reports on the dynamic characteristics of the aforementioned servo motors.
Autonomous control algorithms developed and based on complex mathematical models are generally complex and may not necessarily be appropriate for execution by a computer that is subject to stringent restrictions on its computational capabilities due to weight limitations.
However, entering such signals into the aforementioned small unmanned helicopter involves risk.

 Login to View More
Login to View More  Login to View More
Login to View More