ADP-based underwater rocker arm system control method and system
A control method and system model technology, applied in the direction of adaptive control, comprehensive factory control, general control system, etc., can solve the problems of waste, only focus on accuracy, rough energy, etc., and achieve the effect of saving energy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
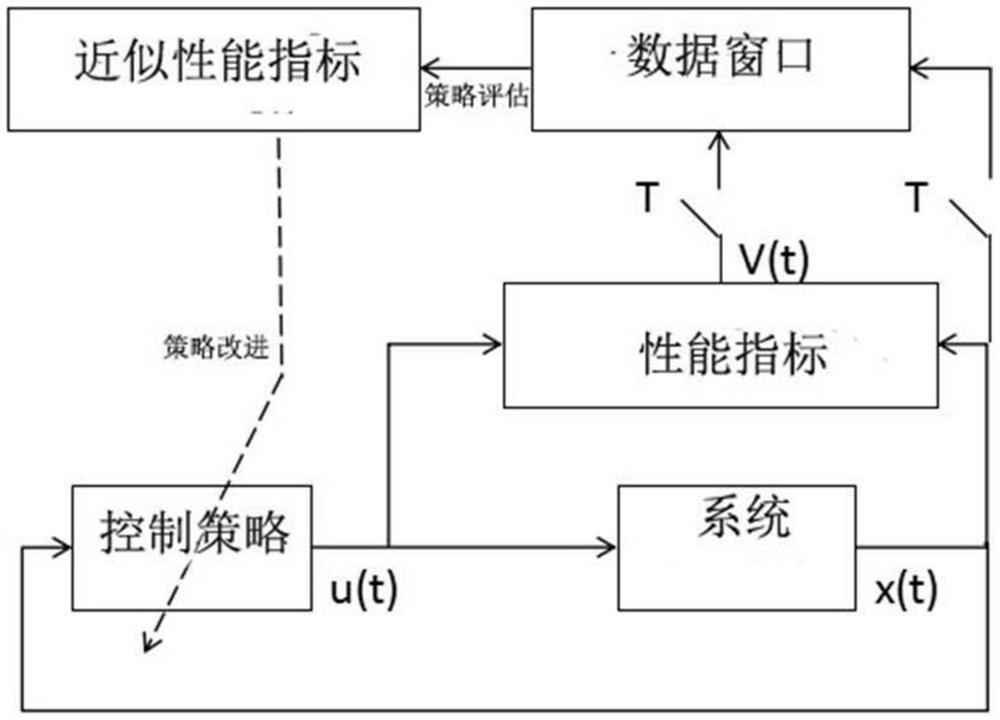
[0043] A control method for an underwater rocker system based on ADP, comprising: establishing an underwater rocker system model considering resistance in water; establishing an energy optimal control function of the underwater rocker system model; constructing an energy optimal control function based on The neural network model of the underwater rocker system; the neural network model of the underwater rocker system is solved based on the ADP algorithm, and the energy optimal control strategy of the underwater rocker system is obtained.
[0044] Step 1: Establish an underwater rocker system model considering the resistance in water.
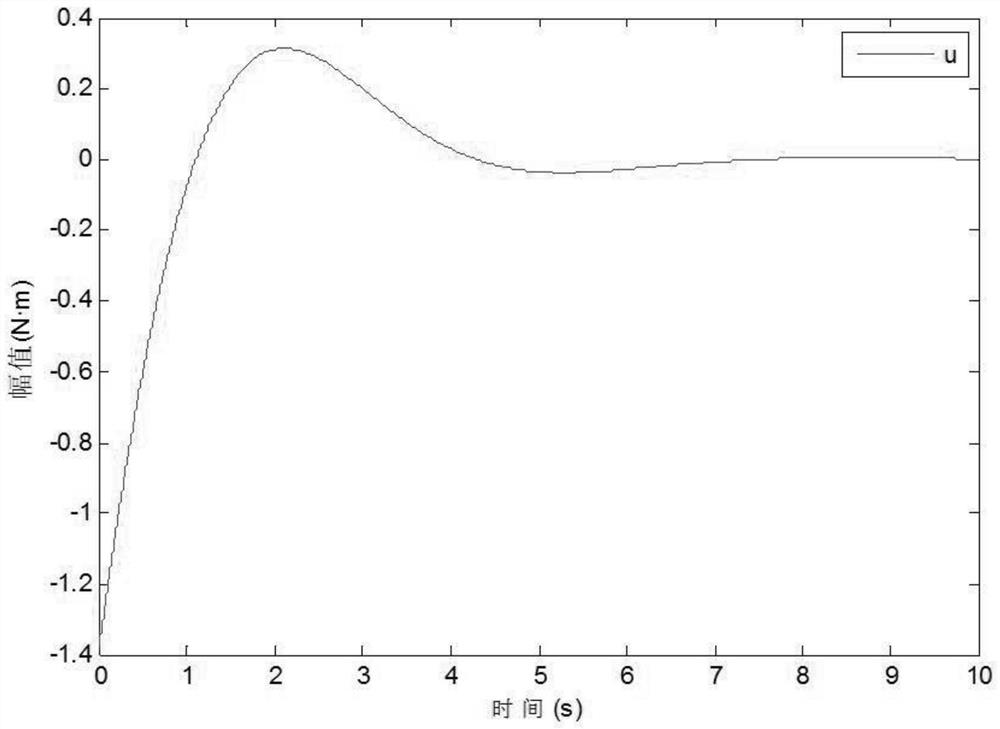
[0045] Such as figure 1 For the rocker example shown, if water resistance is considered, the equation can be obtained according to the mechanism modeling:
[0046]
[0047] Among them, q is the angle of the rocker away from the horizontal position, M is the mass of the rocker arm, L is the distance from the center of gravity, J is the moment...
Embodiment 2
[0092] Based on the control method of an ADP-based underwater rocker system described in Embodiment 1, this embodiment provides a control system for an ADP-based underwater rocker system, including: a first module for establishing The underwater rocker system model of underwater resistance; the second module is used to establish the energy optimal control function of the underwater rocker system model; the third module is used to construct the neural network of the underwater rocker system based on the energy optimal control function Network model; the fourth module is used to solve the neural network model of the underwater rocker system based on the ADP algorithm, and obtain the energy optimal control strategy of the underwater rocker system.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com