Finite time tracking control method and device for under-actuated unmanned ship based on integral sliding mode
A limited-time, integral sliding mode technology, applied in electric controllers, controllers with specific characteristics, etc., can solve the problems of complex steps, difficult to effectively control ship tracking, etc., to achieve short response time, accurate acquisition, and shortened response time Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
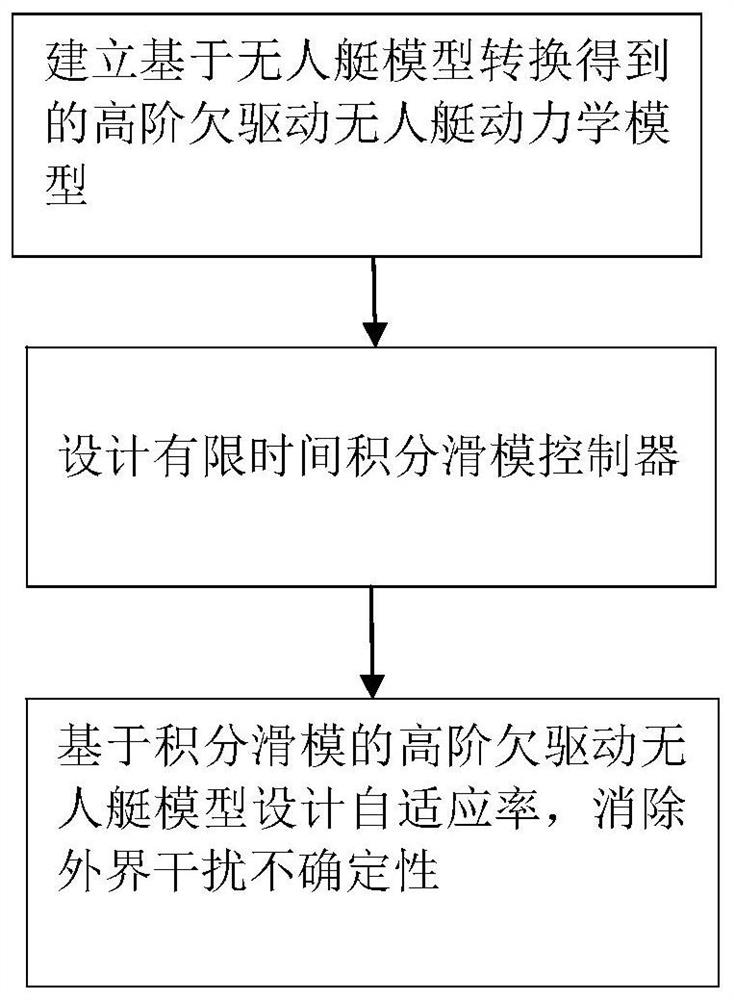
[0045] Implementation Mode 1. Refer to figure 1 , figure 2 as well as image 3 This embodiment will be described. The finite-time tracking control method of the underactuated unmanned boat based on integral sliding mode described in this embodiment, the method includes:
[0046] (1) Establish a high-order underactuated unmanned vehicle dynamics model based on the conversion of the unmanned vehicle model;
[0047] (2) According to the high-order underactuated unmanned vehicle dynamics model, the finite time integral sliding mode controller of design;
[0048] (3) According to the high-order underactuated unmanned vehicle dynamics model and the finite time integral sliding mode controller, design a finite time tracking controller and design an adaptive law to eliminate the uncertainty of external interference;
[0049] The finite-time tracking control method of the underactuated unmanned vessel based on integral sliding mode is characterized in that, the high-order underactua...
Embodiment approach 2
[0131] Embodiment 2. A finite-time tracking control device for an underactuated unmanned ship based on integral sliding mode described in this embodiment includes: one or more processors; memory; and one or more programs, one or more of which A plurality of programs are stored in the memory and are configured to be executed by the one or more processors, the programs include a method for performing an integral sliding model based Instructions for finite-time tracking control method for underactuated unmanned vehicles.
Embodiment approach 3
[0132] Embodiment 3. The computer device described in this embodiment is characterized in that it includes a memory and a processor, the memory stores a computer program, and when the processor runs the computer program stored in the memory, the The processor executes the finite-time tracking control method of the underactuated unmanned vehicle based on integral sliding mode as described in any one of the above-mentioned embodiments.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com