Air-ground dual-purpose hexapod robot
A hexapod robot, land-air dual-use technology, applied in the field of land-air dual-use hexapod robots, can solve the problems of great influence of ground conditions, low body chassis, inability to adapt to low-lying water on the ground, etc. Effects of transport, improved debuggability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be described in detail below in conjunction with the embodiments shown in the accompanying drawings.
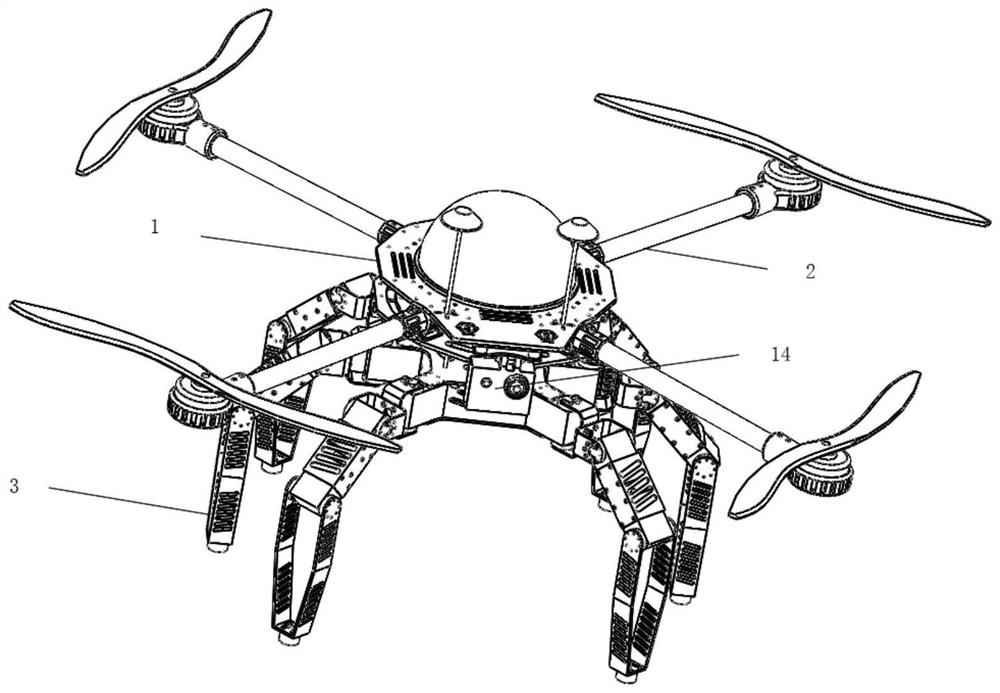
[0019] Such as figure 1 As shown, the ground-air integrated hexapod robot of the present invention includes a control cabin (1), a flying mechanism (2), and a crawling mechanism (3).
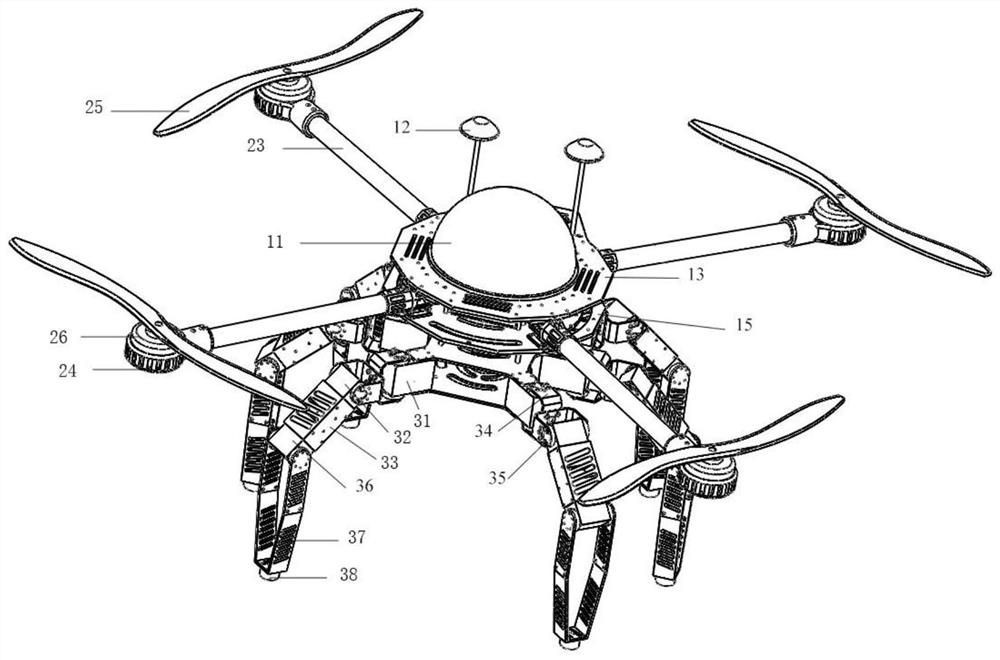
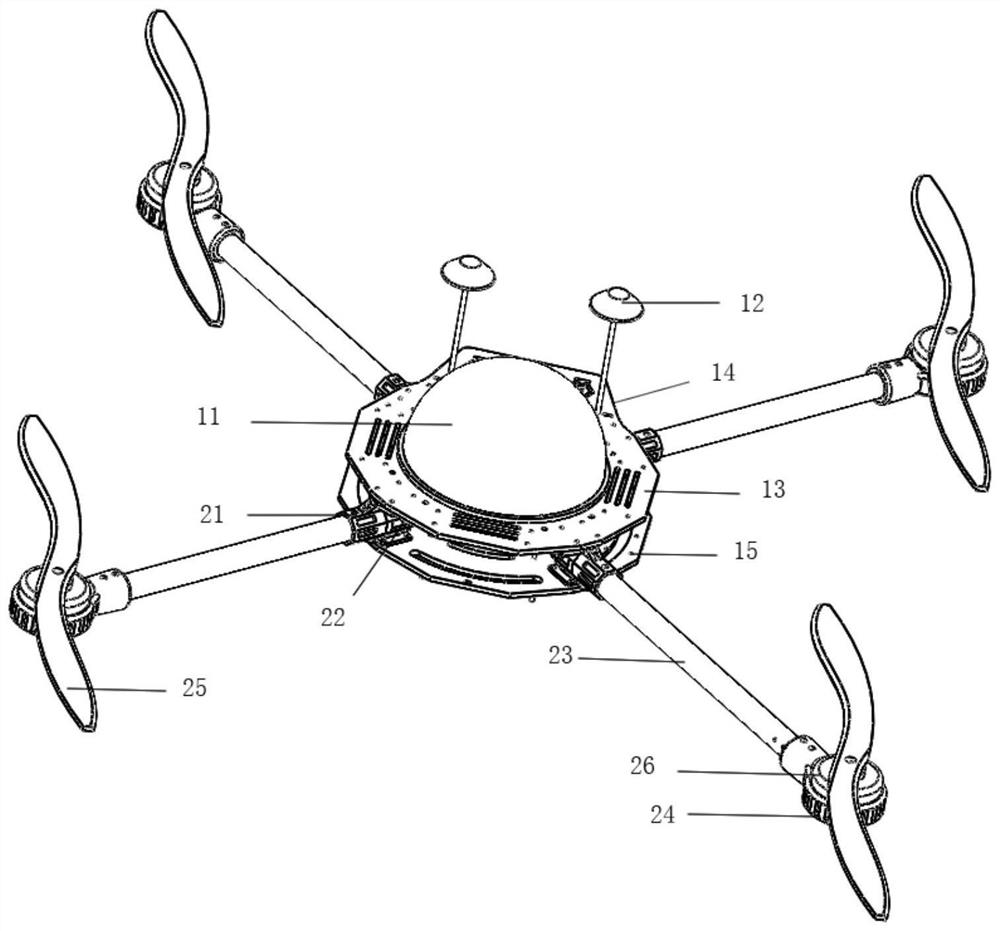
[0020] A dual-purpose hexapod robot for land and air, such as figure 2 As shown, the control cabin (1) and the flying mechanism (2) constitute the upper half of the robot, and the crawling mechanism constitutes the lower half of the robot, and the two are connected by four M4*50 copper pillars. The upper cover plate (13) of the UAV is an approximately circular tetradecagon, with a protective cover (11) and GPS (12) placed above, an electronic speed controller placed below to control the rotor speed, and a pan-tilt camera (14) placed in front of the machine. The arm (23) is located between the UAV upper cover (13) and the UAV lower cover (15) through the fold...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com