An rgb-d visual slam method based on point and line features
A RGB-D, visual technology, applied in image analysis, image enhancement, instruments, etc., can solve the problems of low accuracy, large illumination changes, low semantics, etc., to reduce drift errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
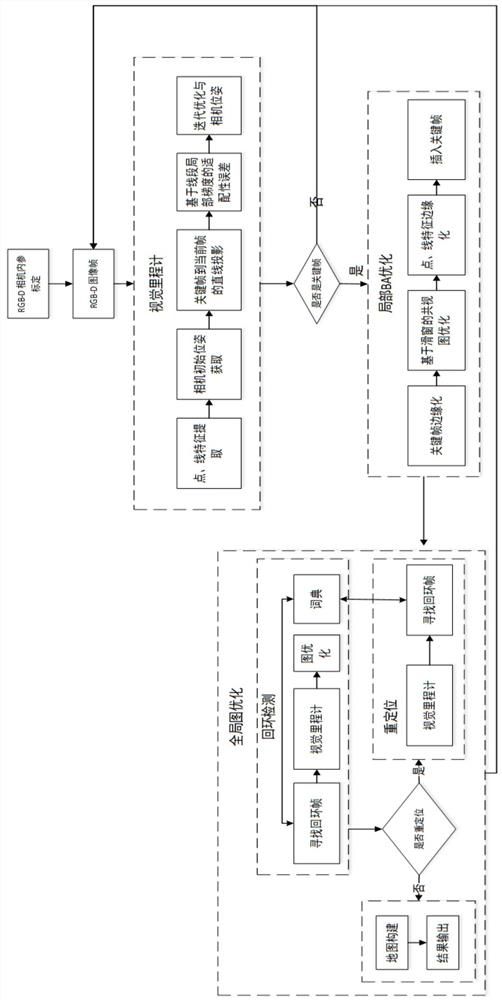
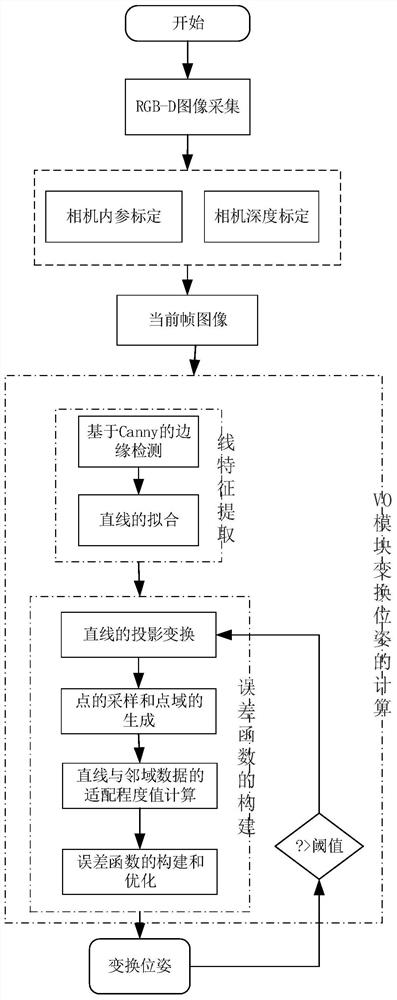
[0087] likefigure 1 and figure 2 As shown, a RGB-D visual SLAM method based on point and line features provided by the present invention includes the following steps:
[0088] S1, RGB-D camera internal parameter calibration: The RGB-D camera is used as the image acquisition device to calibrate the internal parameters of the RGB-D camera. The internal parameters of the RGB-D camera include the camera's principal point, focal length and distortion coefficient:
[0089] S11. Take the RGB-D camera as the image acquisition device, and use the RGB-D camera to shoot fixed-size calibration boards (checkerboards) at different angles to obtain image data required for calibration; the RGB-D camera is used as the image in the present invention. Acquisition equipment, the RGB-D camera can provide a pair of registered RGB images and depth images in real time, and the depth images can provide accurate depth information for the subsequent conversion of pixel coordinates to three-dimensional ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com