Multi-camera system calibration method based on pedestrian head recognition
A multi-camera and system calibration technology, applied in the field of computer vision, can solve the problems of complex calibration process of accurate calibration objects and high-precision known calibration information, etc., achieve good calibration effect, simple method, and improve calibration efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] In order to facilitate those of ordinary skill in the art to understand and implement the present invention, the present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the implementation examples described here are only used to illustrate and explain the present invention, and are not intended to limit this invention.
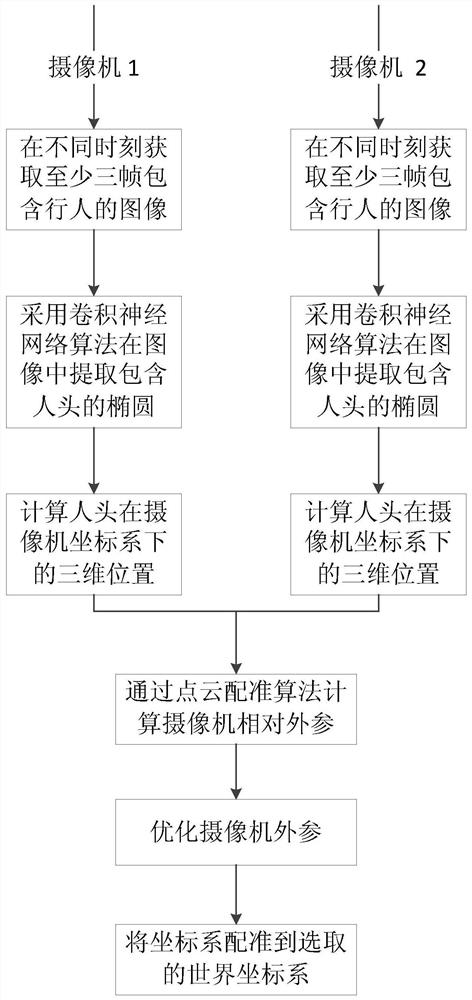
[0044] A method for calibrating a multi-camera system based on pedestrian head recognition, comprising the following steps:
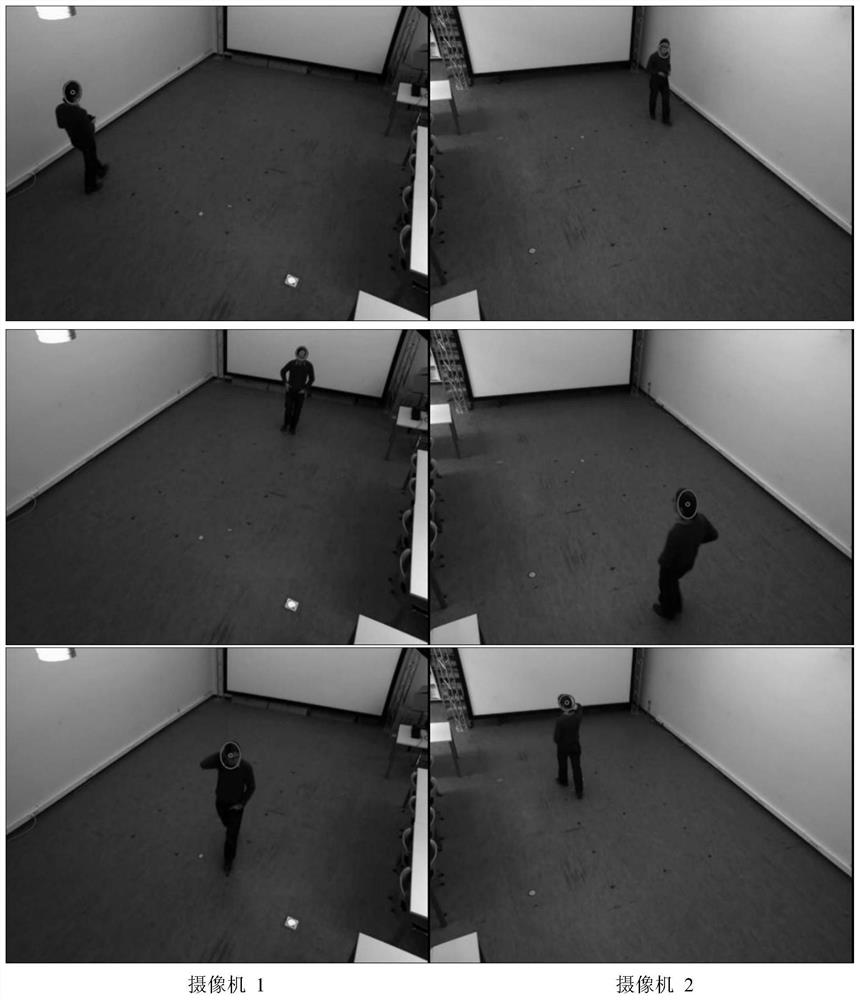
[0045] Step 1. After installing the multi-camera system, first a single pedestrian walks in the camera-monitored area, and then multiple cameras simultaneously record video to obtain a synchronized video;
[0046] Step 2, intercepting at least three frames of images from each video;
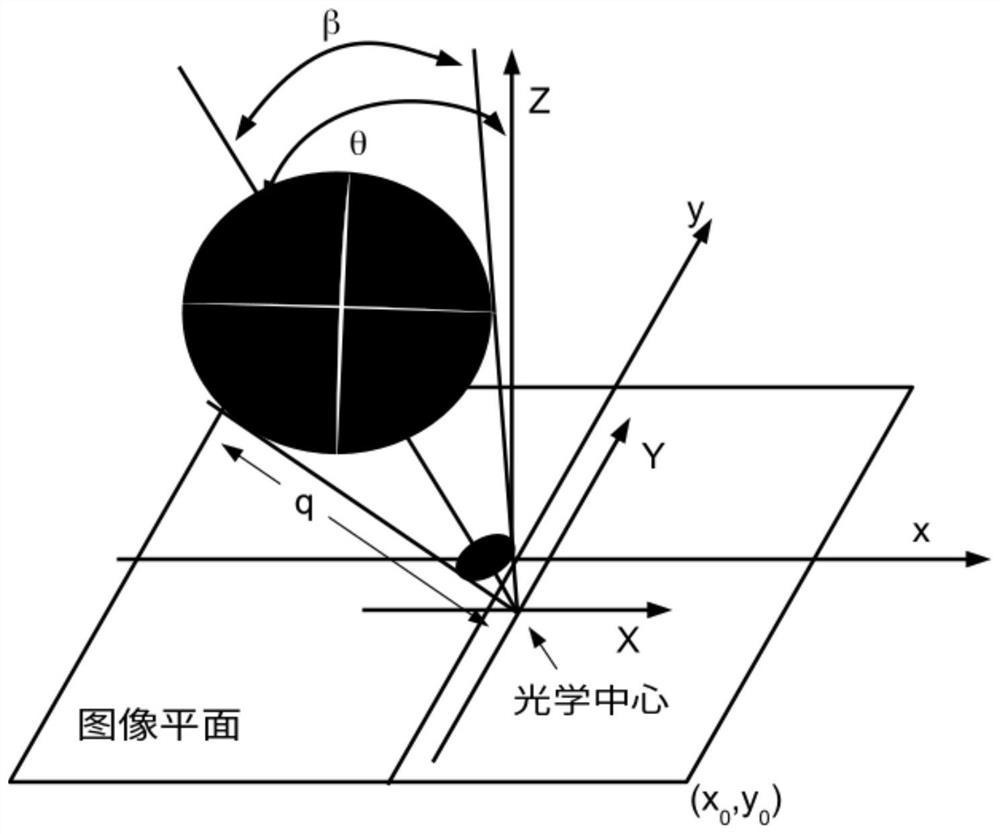
[0047] Step 3, each frame of image is processed, and the CNN convolutional neural network method is used to extract the ellipse of the avatar in the ima...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com