Three-dimensional point cloud semantic segmentation method based on segmentation network and adversarial network
A technology of 3D point cloud and semantic segmentation, which is applied in image analysis, character and pattern recognition, image data processing, etc., can solve the problem of long and unreasonable segmentation of point cloud, and does not take into account the high-dimensional inconsistency between segmentation results and real labels and other problems, to achieve the effect of high accuracy of segmentation results and short segmentation time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0053] The present invention will be further described below in conjunction with the accompanying drawings.
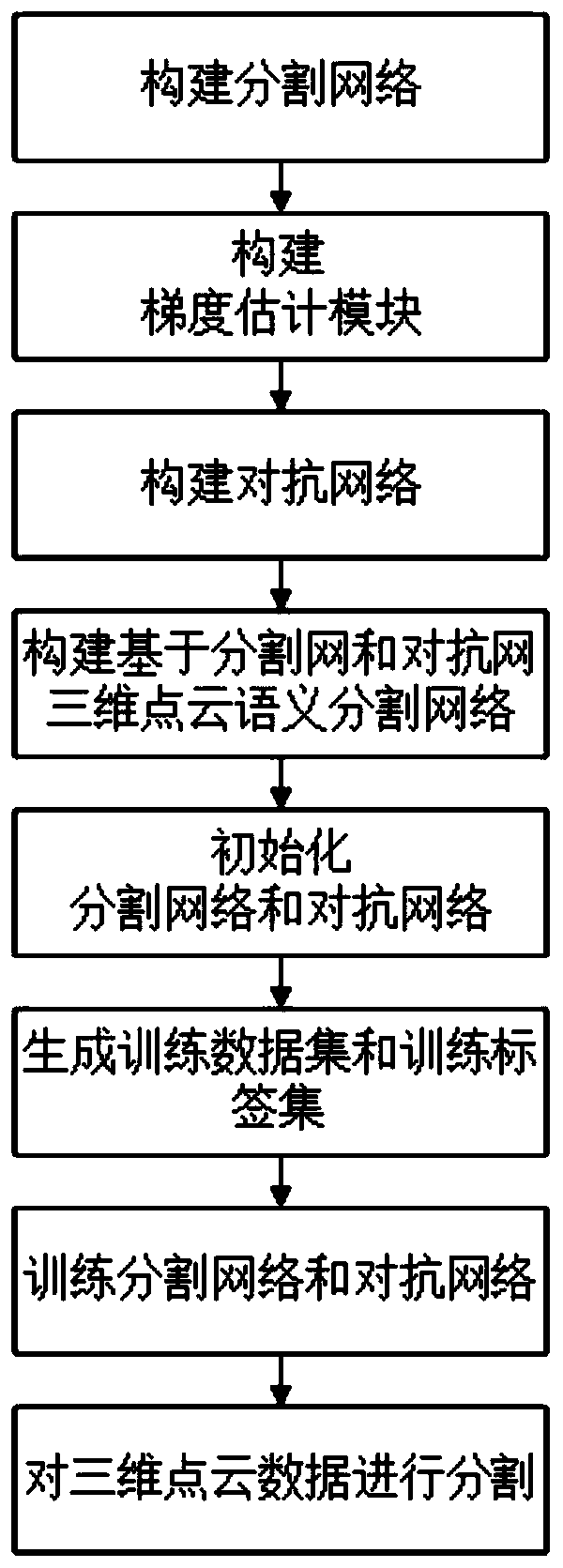
[0054] Reference attached figure 1 , to further describe the specific steps of the present invention.
[0055] Step 1. Build the segmentation network.
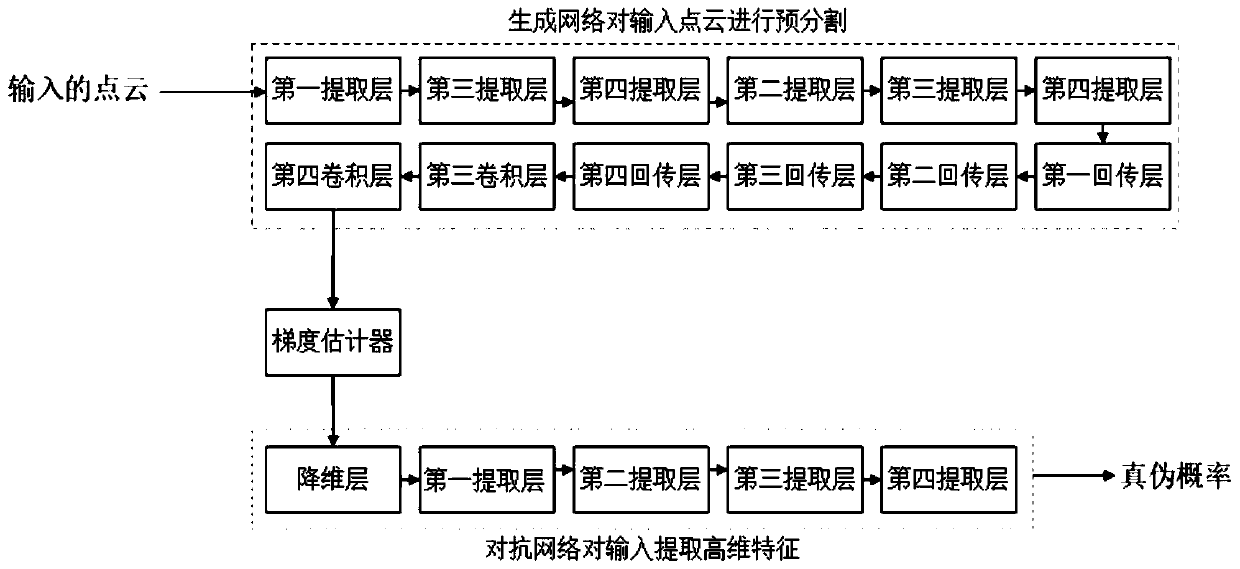
[0056] Build a 10-layer segmentation network, and its structure is as follows: first extraction layer → second extraction layer → third extraction layer → fourth extraction layer → first return layer → second return layer → third return layer → Fourth return layer → Third convolutional layer → Fourth convolutional layer.
[0057] The structure of each extraction layer is: sampling module → grouping module → first feature extraction module → first maximum pooling module; the structure of the first feature extraction module is: first convolutional layer → first batch Normalization layer → first ReLu activation layer.
[0058] The structure of each return layer is: interpolation module→dimension enhancement module→sec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com