Unmanned aerial vehicle target tracking method and system based on color histogram similarity
A color histogram and target tracking technology, applied in the field of computer vision, can solve the problems of low tracking accuracy, increased computational complexity, and small amount of calculation, to ensure tracking accuracy and robustness, improve real-time performance of algorithms, and reduce updates The effect of frequency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
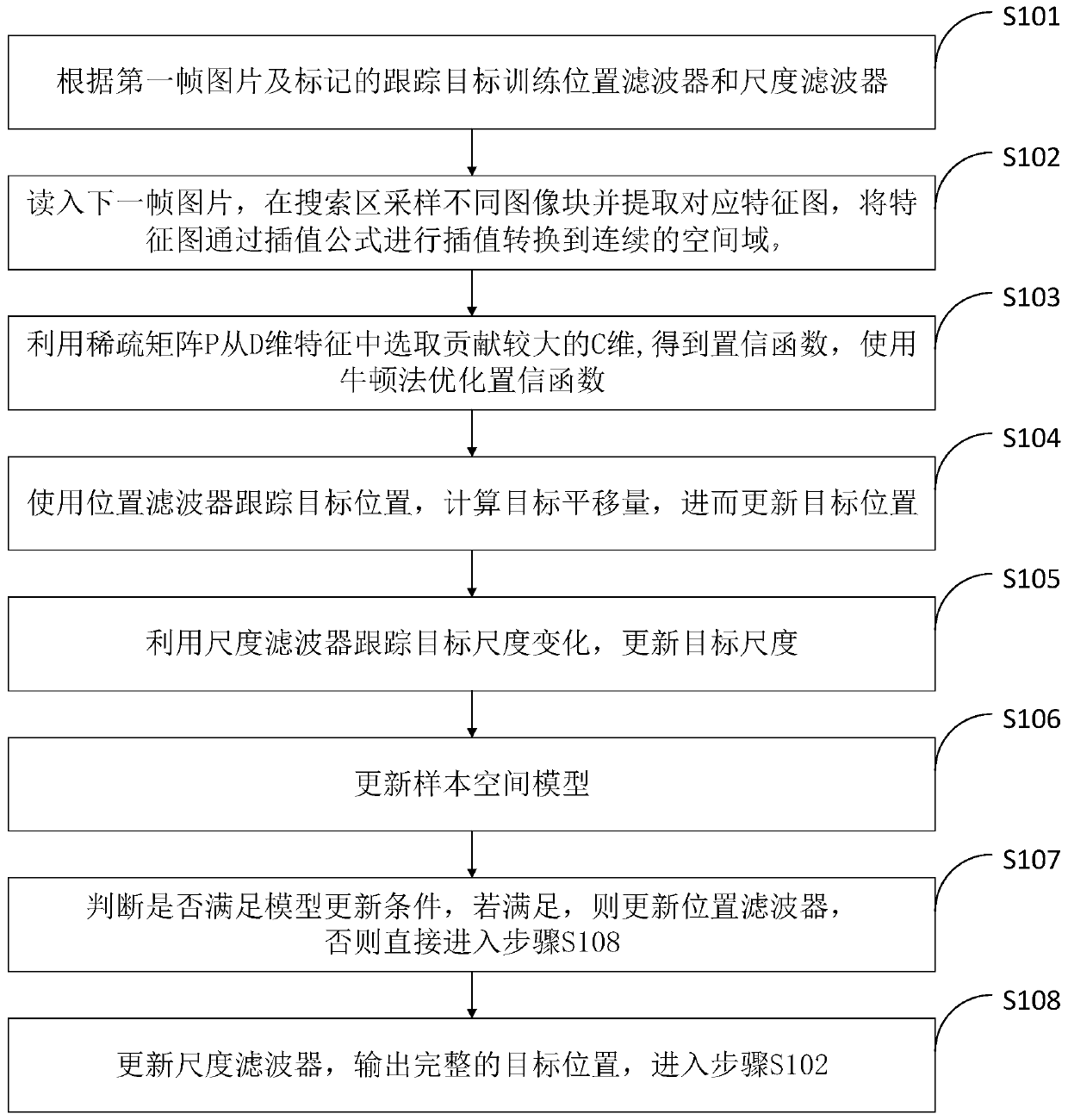
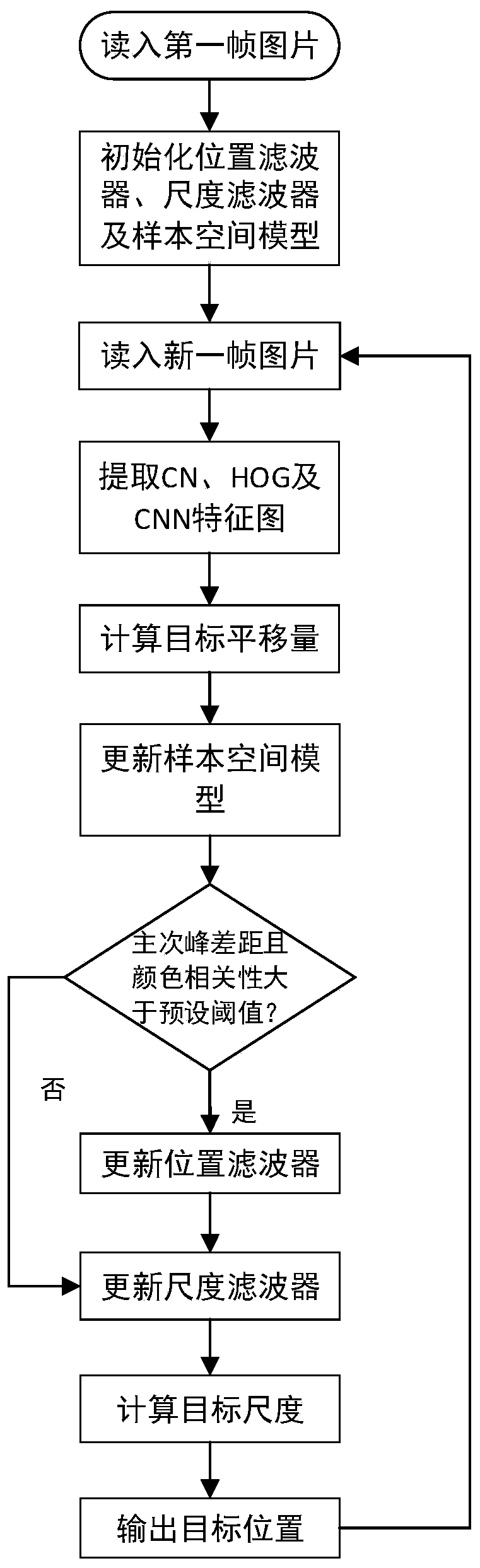
[0131] The UAV target tracking method based on the color histogram similarity provided by the embodiment of the present invention comprises the following steps:
[0132] (1) Train location filters and scale filters. The UAV target tracking method based on color histogram similarity trains the correlation filter according to the first frame picture and the marked tracking target. The specific steps of training are as follows:
[0133] a. Initialize the scale filter. The scale filter uses HOG features to track the target scale, the number of scales is 17, the scale step is 1.02, and the standard deviation of the Gaussian label function of the scale model is 0.0625.
[0134] b. Take samples. The target and the surrounding part of the background are used as the search area, and an image block x with a size of I×J is obtained. Flip the picture to increase the overall number of samples, that is, flip the picture up and down and flip it left and right and then add it to the train...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com