A route planning method and system for a logistics system
A technology for route planning and logistics systems, which can be used in road network navigators, comprehensive factory control, navigation, etc., and can solve the problems of complex calculation, poor flexibility, and low reliability of route planning models.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
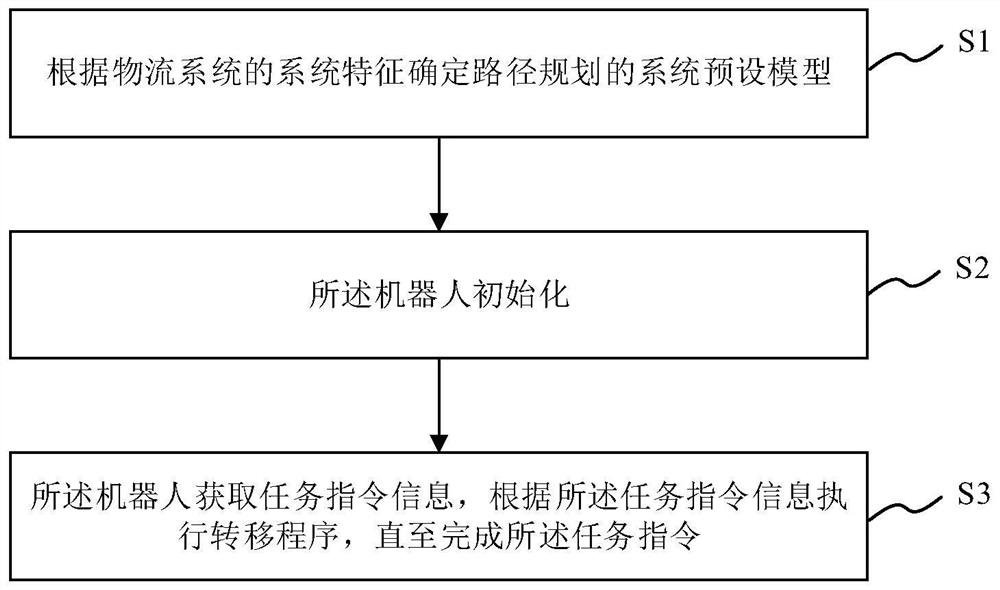
[0066] See figure 1 , a path planning method for a logistics system provided by the present invention, in this embodiment, the method includes the following steps:
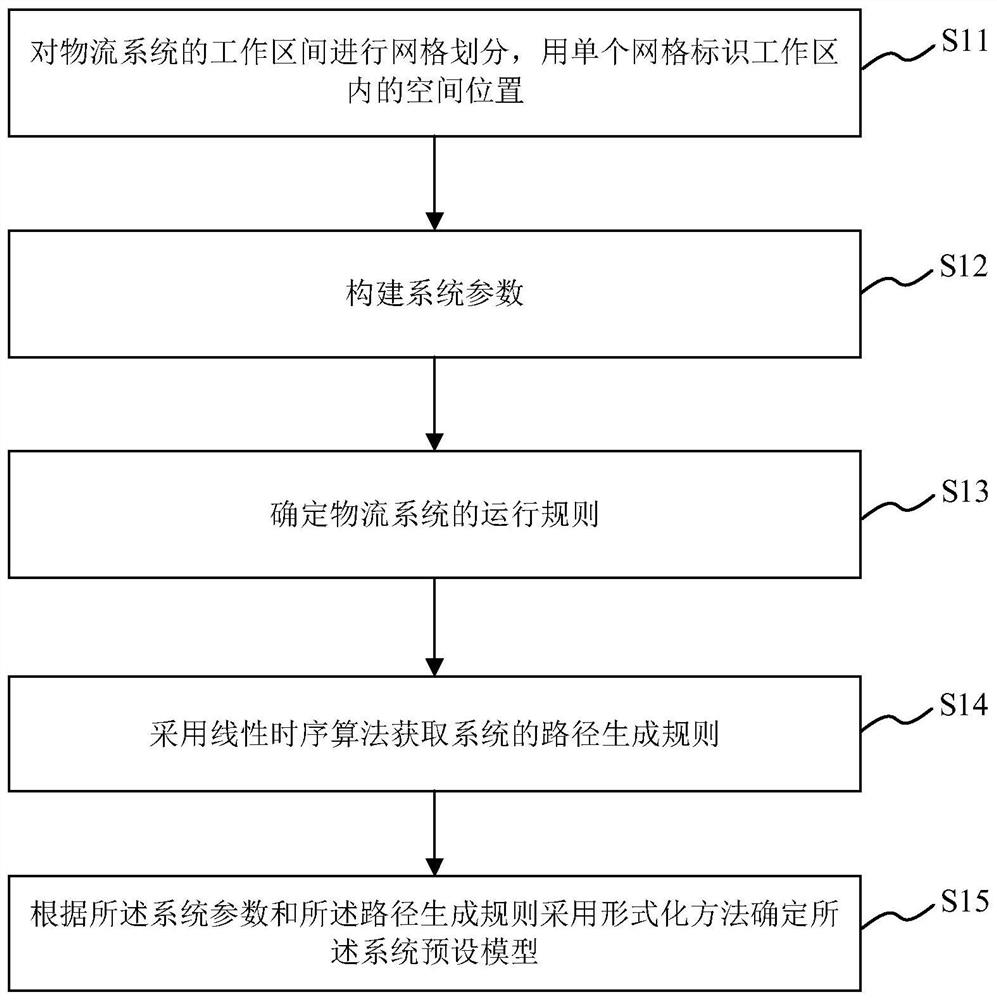
[0067] S1: Determine the system preset model for route planning according to the system characteristics of the logistics system; to construct the system preset model using a formal method, please refer to figure 2 , the construction method includes:
[0068] S11: Perform grid division on the work area of the logistics system, and use a single grid to identify the spatial position in the work area;
[0069] In the specific implementation, the work area of the logistics system is divided in the form of regular grids, each grid identifies a space state, and the work area is represented by grids as:
[0070] W={r 1 , r 2 , r 3 ,...,r n }
[0071] S12: constructing system parameters; the system parameters include the spatial position information, motion state information, execution strategy information, and...
Embodiment 2
[0109] A schematic flowchart of a path planning method for a logistics system provided by the present invention in another embodiment is roughly the same as the step content of the method in the embodiment 1, and the difference is:
[0110] Before executing the step S3, that is, before the robot executes the transfer program, the robot obtains the priority information of the robot; the priority information includes its own priority information and the total priority information of all robots in the system .
[0111] During specific implementation, the method of obtaining the priority information includes obtaining the priority information through communication between the robot and the server.
[0112] Further, the total priority information is information that reflects the priority order of all robots in the logistics system, and the self-priority information is information that reflects the priority order of a single robot among all robots; The priority information is a set...
Embodiment 3
[0131] A path planning method for a logistics system provided by the present invention, in this embodiment, the method includes the following steps:
[0132] S1: According to the system characteristics of the logistics system, a formal method is used to construct a system preset model for determining the route planning;
[0133] S2: Initializing the robot, including initializing the priority information and status information of each robot;
[0134] Further, the robot initialization further includes setting the initialized current spatial position of the robot as an initial position.
[0135] S3: The robot acquires task instruction information, and executes a transfer program according to the task instruction information until the task instruction is completed.
[0136] In the step S1, the formal method is used to construct the system preset model, and the construction method is the same as the construction method of the system preset model in the above-mentioned Embodiment 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com