Intelligent fruit picking robot and implementation method thereof
A technology for picking robots and robot bases, applied to picking machines, manipulators, harvesters, etc., can solve the problems of increased complexity of robot hand posture control, incoherent work, and increased space occupation, and achieve rapid response processing and action execution. Guarantee the effect of reliability and stability, efficiency and quality improvement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0051] In this embodiment, an apple is taken as an example to describe in detail the intelligent apple picking robot proposed in this embodiment.
[0052] figure 1 It is the front view of the smart apple picking robot involved in this embodiment. Such as figure 1 As shown, the smart apple picking robot includes a mechanical system and a control system; among them:
[0053] The mechanical system includes a robot base 1, two crawler walking mechanisms installed symmetrically on both sides of the base, a scissor lift mechanism installed on the base, a four-degree-of-freedom robot mechanism on the scissor lift mechanism, and The picking actuator at the front end of the robot mechanism and the image acquisition mechanism installed on the base.
[0054] Such as figure 1 As shown, the crawler walking mechanism includes two crawler wheels 2 installed on the front and rear of the side of the robot base, a walking crawler 1 wound on the two crawler wheels, and a crawler wheel installed on the...
Embodiment 2
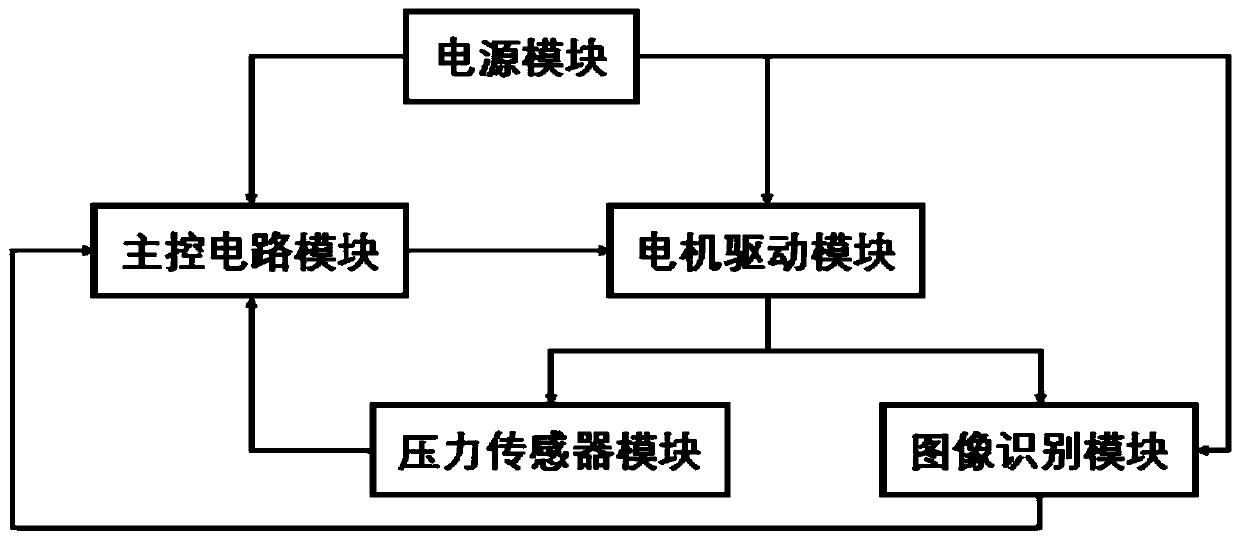
[0070] This embodiment provides a method for implementing an intelligent fruit picking robot. The method includes the following steps:
[0071] The camera of the image acquisition agency collects the complete fruit tree image and transmits it to the camera image recognition module;
[0072] The camera image recognition module uses the Python machine vision algorithm to process the obtained fruit tree image, calculates the proportion of red and yellow in each part of the image, determines whether the apple is mature and its precise location information, and transmits it to the main control circuit module via a UART serial port;
[0073] The main control circuit module obtains the precise position information of the mature apple obtained after the image processing of the camera image recognition module, and according to the positioning information, adopts the robot attitude control algorithm, and outputs the PMW signal to control the servo motor of the lifting mechanism and the servo mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com