High-dexterity three-dimensional curved surface welding robot device
A technology of welding robot and three-dimensional curved surface, which is applied in the direction of auxiliary equipment, welding equipment, auxiliary welding equipment, etc., can solve the problems of manual work, large limitations, and limited working space, so as to improve welding efficiency, large working space, The effect of small weight-to-load ratio
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with accompanying drawing:
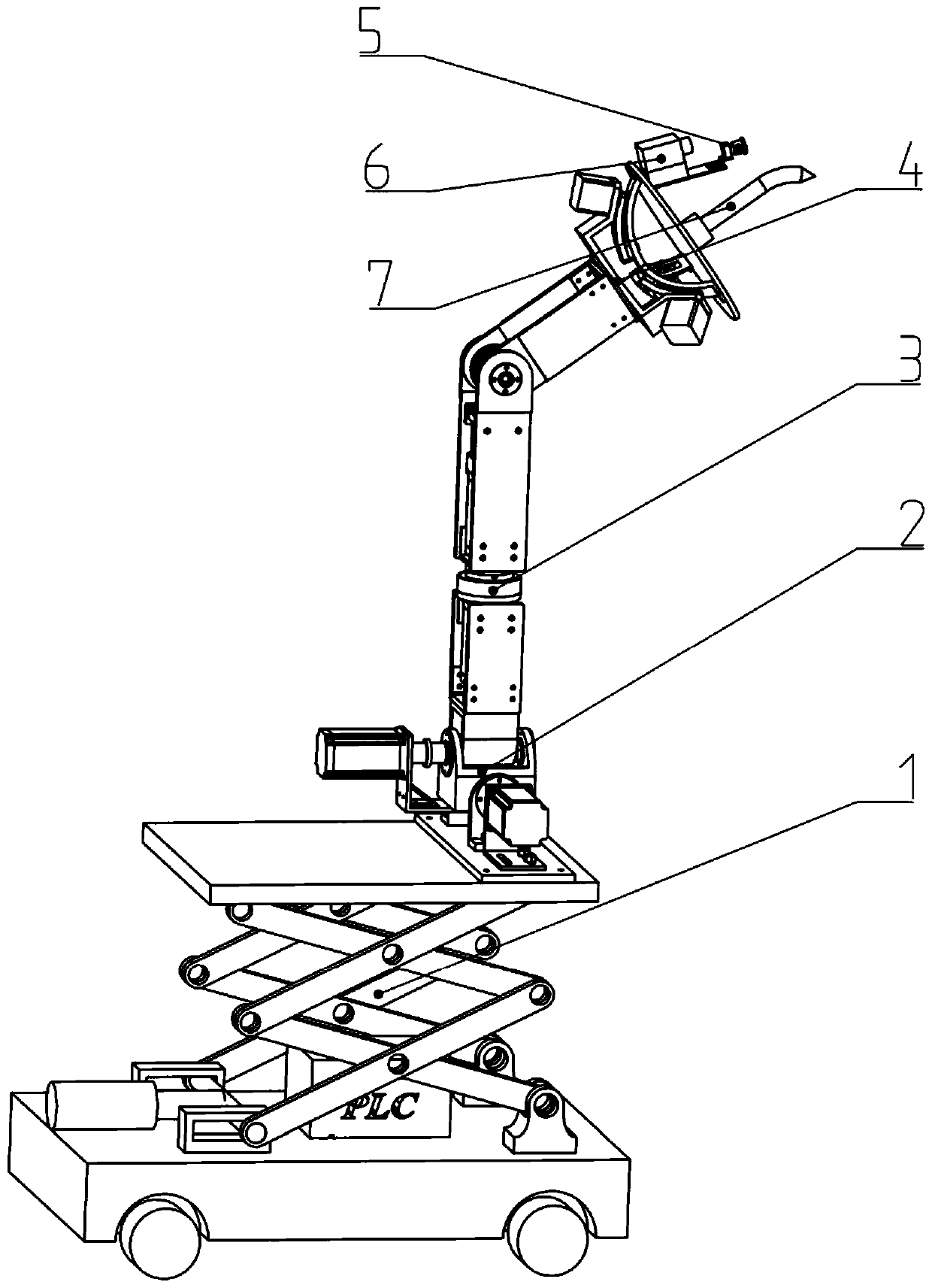
[0029] like Figure 1~5 As shown, a high-dexterity three-dimensional curved surface welding robot device includes a lifting platform vehicle 1, a shoulder joint module 2, an elbow joint module 3, a wrist joint module 4, a vision unit 5, a distance measuring unit 6 and a welding gun 7. The shoulder joint 2 is fixed on the lifting platform vehicle 1, the elbow joint 3 is fixedly connected to the shoulder joint 4, the wrist joint 4 is fixedly connected to the elbow joint 3, and the vision unit 5, distance measuring unit 6 and welding gun 7 are all It is fixed on the wrist joint 4; the lifting platform car is a motor-driven lifting platform, and the upper platform of the lifting platform is a working platform.
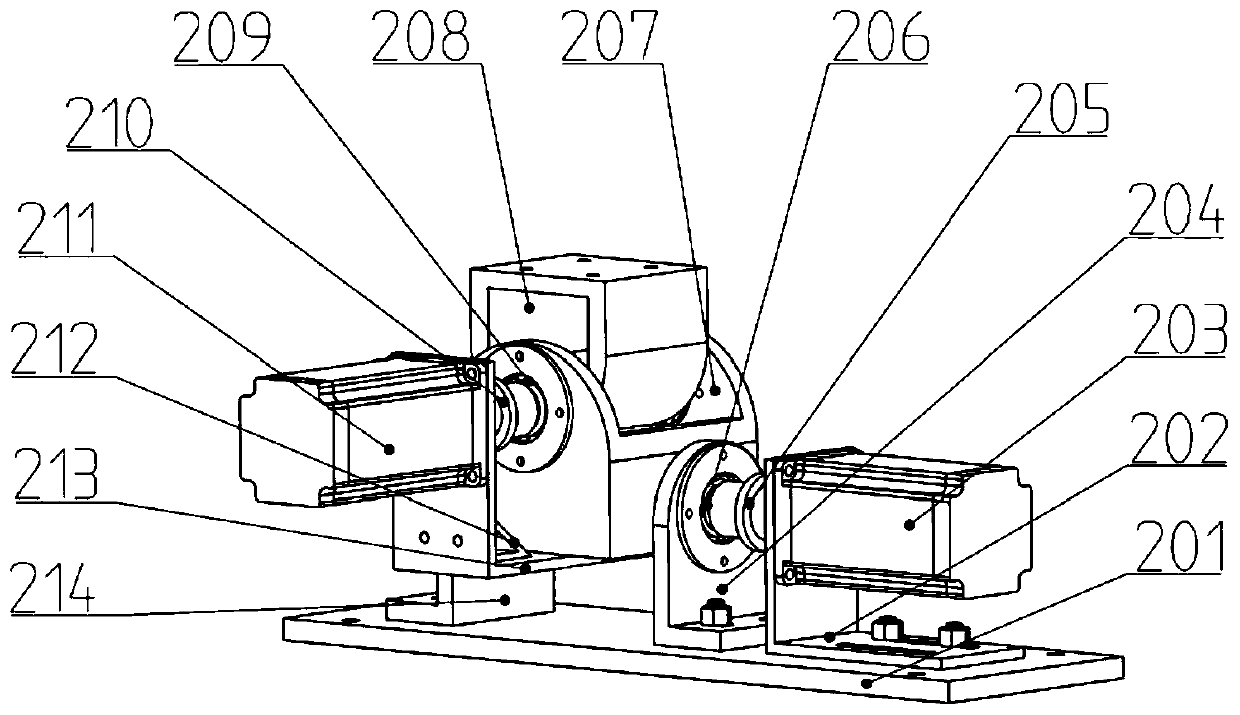
[0030] The shoulder joint module 2 includes a shoulder joint fixed platform 201, a first motor bracket 202, a first motor 203, a first shoulder joint dynamic platform ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com