Self-balancing robot control method
A control method and robot technology, applied in attitude control, non-electric variable control, control/regulation system, etc., can solve problems such as height instability, angle deviation, system instability, etc., to ensure safety and stability, reduce Algorithmic pressure, the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
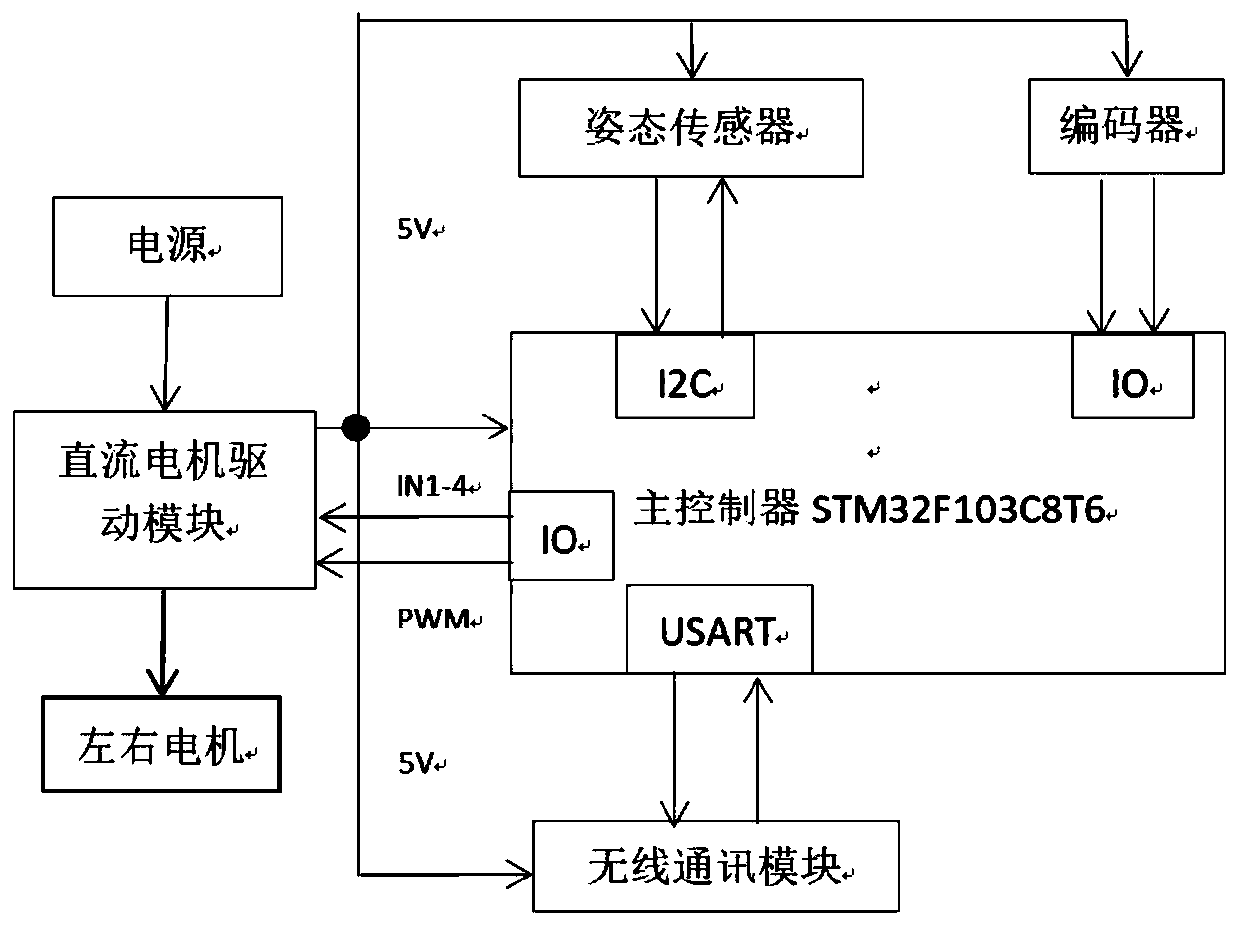
[0033] A control method for a self-balancing robot includes an electrical system, the electrical system is divided into a control module, an attitude detection module, a wireless communication module, an execution module, and a power supply module; wherein the power supply module provides a stable DC power drive module for other parts, The control module issues instructions to control the DC motor in the execution module to run according to the programming method, and the encoder forms a feedback loop; the changes in the attitude angles in all directions during the system movement are measured by the attitude detection module, and uploaded for data processing and analysis. At the same time, the data is fed back to the main controller to form a control loop;
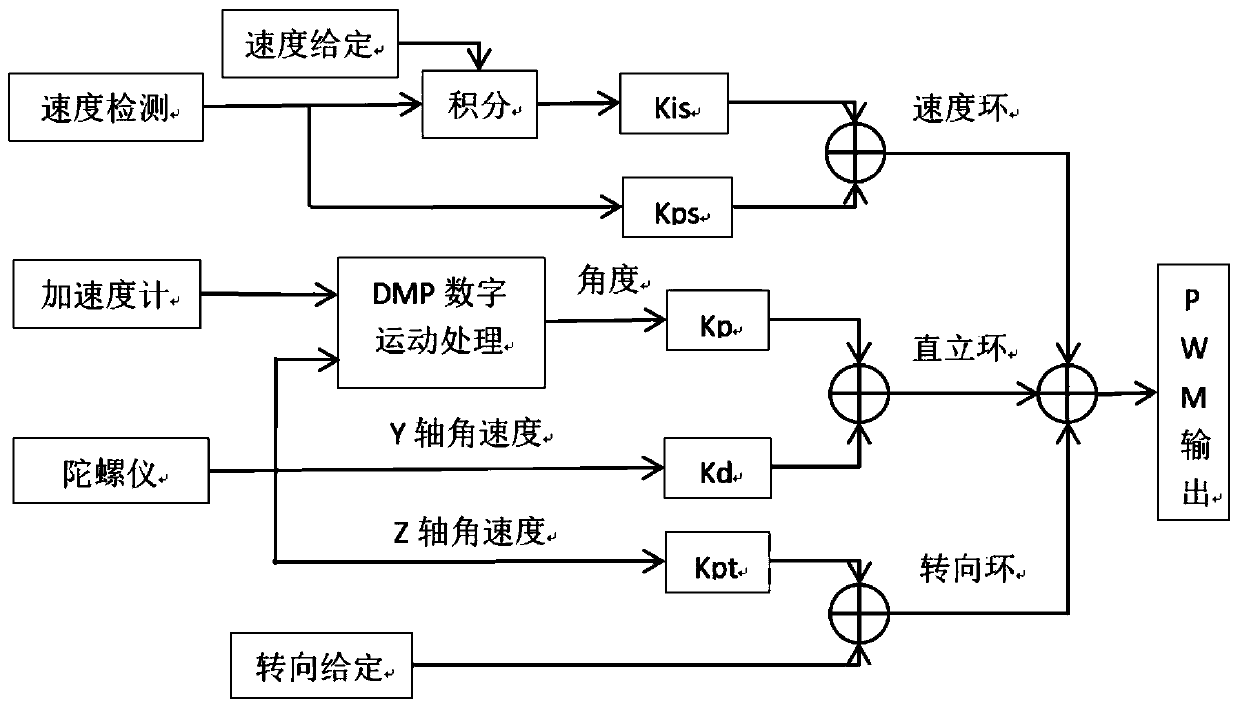
[0034] The attitude detection module uses a sensor to collect angular velocity and acceleration signals, directly reads the quaternion and acceleration through the DMP of the sensor and directly converts the quaternion int...
Embodiment 2
[0040] see figure 1 A control method for a self-balancing robot includes an electrical system, the electrical system is divided into a control module, an attitude detection module, a wireless communication module, an execution module, and a power supply module; wherein the power supply module provides a stable DC power drive module for other parts , the control module issues instructions to control the DC motor in the execution module to run according to the programming method, and the feedback loop is formed by the encoder; the change of the attitude angle in each direction when the system is moving is measured by the attitude detection module, and uploaded for data processing and analysis At the same time, the data is fed back to the main controller to form a control loop; the data communication between the self-balancing robot and external equipment is realized through the wireless communication module.
[0041] The attitude detection module uses a sensor to collect angular...
Embodiment 3
[0066] A control method for a self-balancing robot includes an electrical system, which provides a stable DC power drive module for other parts through the power module, and the control module issues instructions to control the DC motor in the execution module to run according to the program. Initialization operation, this step is the initialization operation of the entire self-balancing robot, including the initialization of the main controller, the initialization of the sensor, the initialization of the execution module, the initialization of the wireless communication, and the initialization of the interrupt. The initialization of the interrupt can accurately control the embedded operating system and realize a A series of functions, the initialization operation of the wireless communication module can provide guarantee for the communication between the chips, the initialization of the sensor can detect the attitude information more accurately; and the feedback loop is compose...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com