


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Device and method for maintaining the course of unmanned boat under the action of wind and wave disturbance
A technology for course keeping and unmanned boats, applied in two-dimensional position/channel control and other directions, to achieve high practical value, save navigation time and fuel consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
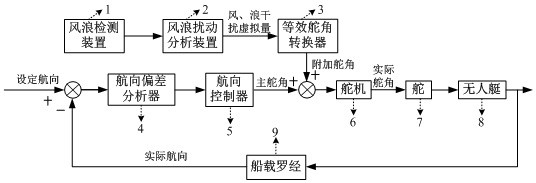
[0030] see figure 1 , an unmanned boat course maintaining device under the action of wind and wave interference, comprising a wind and wave detection device (1), a wind and wave disturbance analysis device (2), an equivalent rudder angle converter (3), a course deviation analyzer (4), a course The controller (5), the steering gear (6), the rudder (7) and the onboard compass (9) are characterized in that: the wind and wave detection device (1) is converted by the wind and wave disturbance analysis device (2) and an equivalent rudder angle The controller (3) is connected to the steering gear (6), the course deviation analyzer (4) is connected to the steering gear (6) via the heading controller (5), the steering gear (6) is connected to the rudder (7), and the rudder (7) is installed On the unmanned boat (8), a shipborne compass (9) is installed on the unmanned boat (8), and the shipborne compass (9) is electrically connected to the heading deviation analyzer (4); the shipborne c...
Embodiment 2
[0031] Embodiment 2: This embodiment is basically the same as Embodiment 1, and the special features are as follows:
[0032] a. The heading deviation analyzer (4) calculates the heading angle deviation, and the steering gear (6) according to the main rudder angle command δ t Turn the rudder (7) and control the course;
[0033] b. Calculate the heading angle deviation again, if the heading angle deviation θ e When the absolute value of is greater than m°, the steering gear (6) is based on the rudder angle command δ sum ,δ sum =δ t +δ wind +δ wave , perform the rudder (7) operation and control the heading accordingly;
[0034] c. Repeat the above two steps until the heading angle deviation θ e The absolute value of is less than or equal to m°.
Embodiment 3
[0035] Example 3: see figure 2 , The device and method for maintaining the course of the unmanned boat under the action of wind and wave interference adopts the above-mentioned device to operate, and the operation steps are as follows:
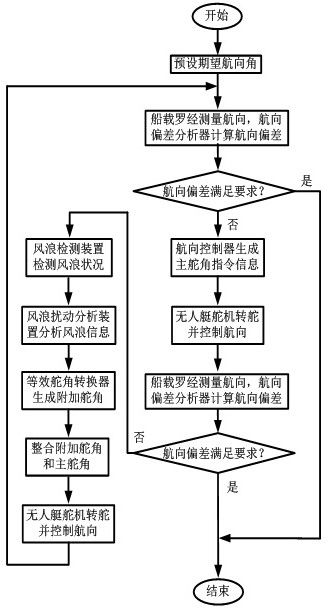
[0036] Step 1: Set the desired heading angle θ according to the mission requirements d ;
[0037] Step 2: The shipborne compass (9) provides the heading information in real time, and the heading deviation analyzer (4) calculates the desired heading angle θ d with the actual heading angle θ r deviation θ e , when the heading angle deviation θ e When the absolute value of is less than or equal to m°, go to the following step 11, otherwise, set the heading angle deviation θ e The information is sent to the heading controller (5);
[0038] Step 3: The heading controller (5) according to the heading angle deviation θ e Generate main rudder angle command δ t and transmit it to the steering gear (6);
[0039] Step 4: The steering gear (6) acc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com