Six-wheel-driven all-weather unmanned patrol vehicle system
A technology for unmanned driving and patrol cars, applied in the direction of two-dimensional position/channel control, etc., can solve the problem that unmanned vehicles cannot walk quickly, increase the attitude adjustment time of unmanned patrol vehicles, and unfavorable unmanned patrol vehicles Dynamic performance and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
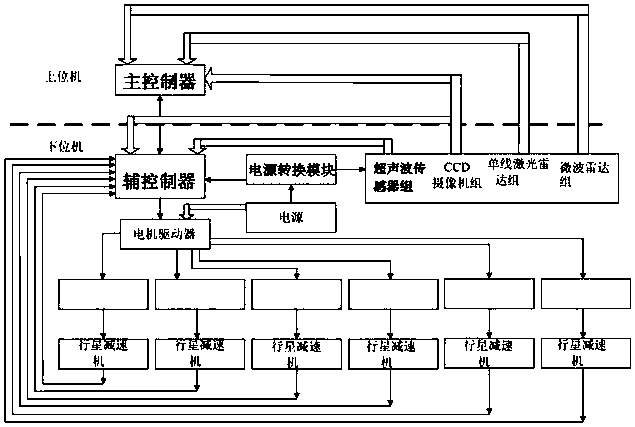
[0095] Such as Figure 1 to Figure 5 As shown, a six-wheel drive all-weather unmanned patrol car system includes a patrol car body 1 and a control system arranged on the patrol car body 1; the lower part of the patrol car body 1 is in the front, middle and rear of the length direction Each is equipped with a pair of driving wheels 2, and the inside of the patrol car body 1 is equipped with six DC motors 4 for driving the six driving wheels 2 respectively. The interior of the patrol car body 1 is equipped with six DC motors 4 for respectively driving the six driving wheels 2; the interior of the patrol car body 1 is also provided with six planetary reducers 5 located outside the motor shafts of the six DC motors 4; The planetary reducer 5 is a 90-degree angular planetary reducer; the length direction of the six DC motors 4 extends in the direction of the length of the patrol car body 1, and the six DC motors 4 are located inside the four drive wheels 2; The DC motor 4 is a rar...
Embodiment 2
[0138] Such as Figure 1 to Figure 5 As shown, a six-wheel drive all-weather unmanned patrol car system includes a patrol car body 1 and a control system arranged on the patrol car body 1; the lower part of the patrol car body 1 is in the front, middle and rear of the length direction Each is equipped with a pair of driving wheels 2, and the inside of the patrol car body 1 is equipped with six DC motors 4 for driving the six driving wheels 2 respectively. The inside of the patrol car body 1 is equipped with six DC motors 4 for respectively driving the six driving wheels 2; the inside of the patrol car body 1 is also provided with six planetary reducers 5 which are respectively located outside the motor shafts of the six DC motors 4, The planetary reducer 5 is a 90-degree angular planetary reducer; the length direction of the six DC motors 4 extends in the direction of the length of the patrol car body 1, and the six DC motors 4 are located on the inside of the four drive wheel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com