Robot and target following obstacle avoidance method based on the same, system, equipment and medium
A robot and target technology, applied in the field of robotics, can solve problems such as the inability of following robots to avoid obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
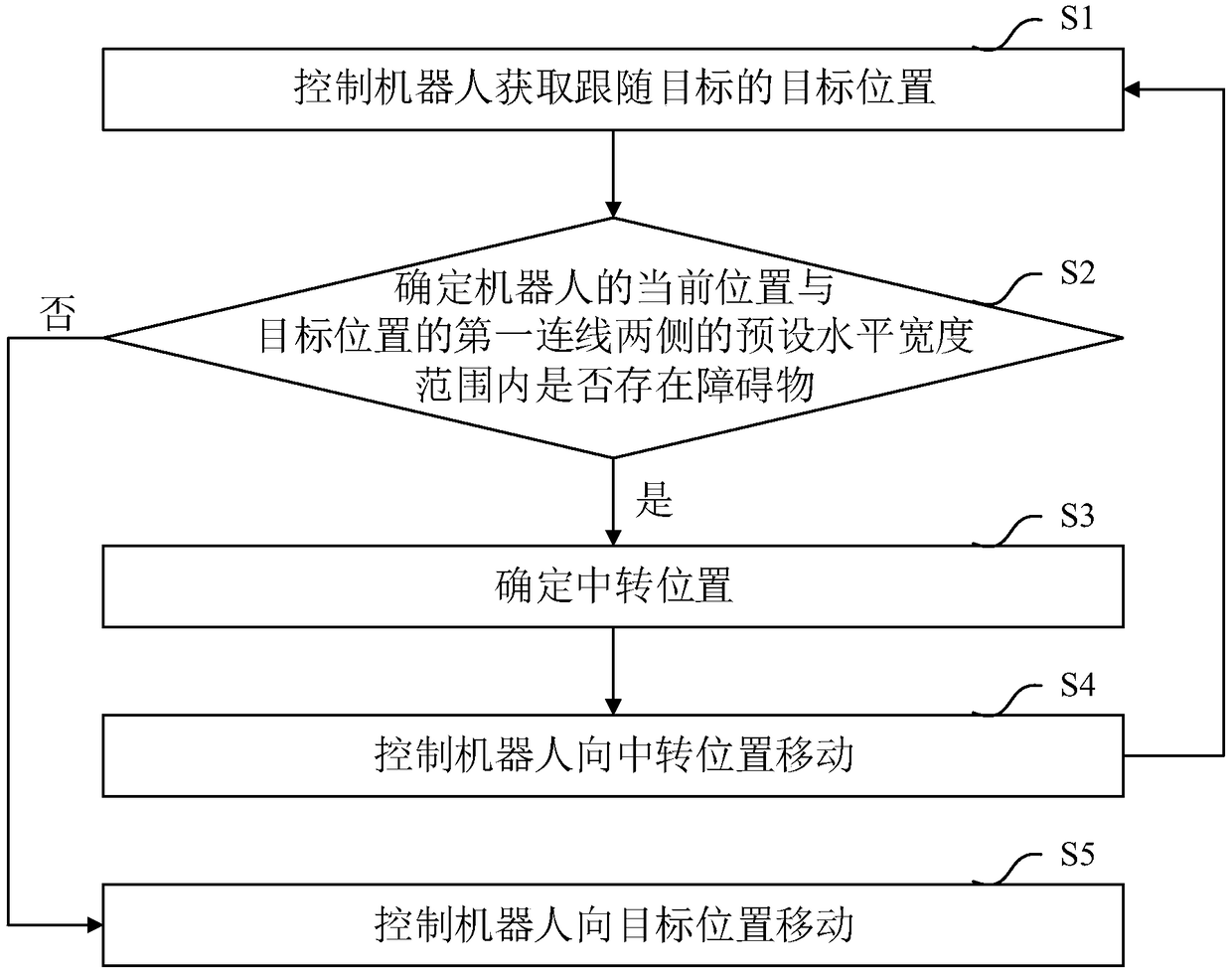
[0100] This embodiment provides a robot-based target following obstacle avoidance method, figure 1 A flowchart of this embodiment is shown. see figure 1 , the target following obstacle avoidance method of this embodiment includes:
[0101] S1. Control the robot to obtain the target position of the following target;
[0102] In this step, the robot can acquire the target position of the following target via UWB communication. Specifically, before this step, at least three UWB base stations can be set on the robot, UWB tags can be set on the following target, and a communication connection can be established between the UWB base station and the UWB tag. In this way, the robot can transmit and receive UWB signals. Solve the target position of the follow target relative to the robot. Among them, the UWB tag can be a wearable device such as a UWB-based bracelet worn by the target.
[0103] S2. Determine whether there are obstacles within the preset horizontal width range on bo...
Embodiment 2
[0145] This embodiment provides an electronic device, which can be expressed in the form of a computing device (for example, it can be a server device), including a memory, a processor, and a computer program stored on the memory and operable on the processor, wherein the processor The robot-based object following obstacle avoidance method provided in Embodiment 1 can be realized when the computer program is executed.
[0146] Figure 9 A schematic diagram of the hardware structure of this embodiment is shown, as Figure 9 As shown, the electronic device 9 specifically includes:
[0147] At least one processor 91, at least one memory 92, and a bus 93 for connecting different system components, including the processor 91 and the memory 92, wherein:
[0148] The bus 93 includes a data bus, an address bus, and a control bus.
[0149] The memory 92 includes a volatile memory, such as a random access memory (RAM) 921 and / or a cache memory 922 , and may further include a read onl...
Embodiment 3
[0155] This embodiment provides a computer-readable storage medium, on which a computer program is stored. When the program is executed by a processor, the robot-based object following obstacle avoidance method provided in Embodiment 1 is implemented.
[0156] Wherein, the readable storage medium may more specifically include but not limited to: portable disk, hard disk, random access memory, read-only memory, erasable programmable read-only memory, optical storage device, magnetic storage device or any of the above-mentioned the right combination.
[0157] In a possible implementation manner, the present invention can also be implemented in the form of a program product, which includes program code, and when the program product runs on the terminal device, the program code is used to make the terminal device execute The robot-based object following obstacle avoidance method in embodiment 1.
[0158] Wherein, the program code for executing the present invention can be written...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com