Sliding mode control method with random nonlinear disturbance
A control method and non-linear technology, which is applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem that the controlled output of the system has a large influence, the precision of sliding mode control is low, and the sliding mode control method cannot handle random problems at the same time. Switch nonlinearity, state time lag and uncertainty, etc., to achieve the effect of resisting parameter perturbation and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
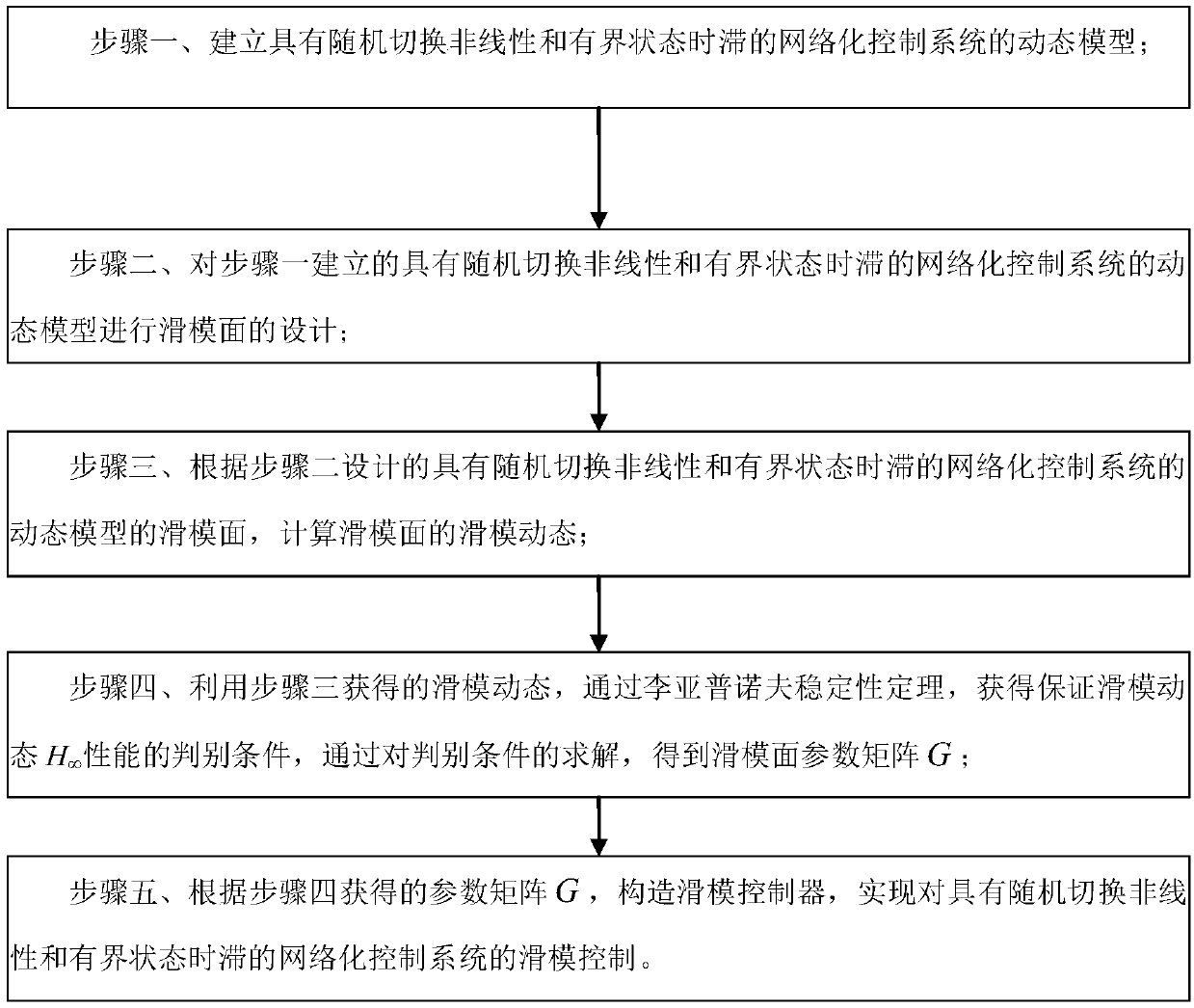
[0019] Specific embodiment one: a kind of sliding mode control method with random nonlinear disturbance comprises the following steps:
[0020] Step 1. Establishing a dynamic model of an uncertain networked control system with stochastic switching nonlinearity and bounded state time-delay;
[0021] Step 2. Design the sliding surface for the dynamic model of the uncertain networked control system with random switching nonlinearity and bounded state time-delay established in step 1;
[0022] Step 3, according to the sliding mode surface of the dynamic model of the networked control system with random switching nonlinearity and bounded state time-delay designed in step 2, calculate the sliding mode dynamics of the sliding mode surface;
[0023] Step 4. Using the sliding mode dynamics obtained in step 3, through the Lyapunov stability theorem, obtain the guaranteed sliding mode dynamics H ∞ The discriminant condition of performance, by solving the discriminant condition, the slid...
specific Embodiment approach 2
[0025] Embodiment 2: The difference between this embodiment and Embodiment 1 is that the specific process of establishing a dynamic model of an uncertain networked control system with random switching nonlinearity and bounded state time-delay in the first step is as follows:
[0026] A dynamic model of a networked control system with stochastic switching nonlinearity and bounded state time-delay is established, and its state-space form is:
[0027]
[0028] z k =Cx k +E 2 ω k (2)
[0029] x k = φ k ,k∈[-τ M ,0]
[0030] where x k is the state variable of the dynamic model of the networked control system at time k, x k+1 is the state variable of the dynamic model of the networked control system at time k+1, is k-τ k The state variables of the dynamic model of the networked control system at time; u k is the control input of the dynamic model of the networked control system at time k; z k is the controlled output of the networked control system at time k; τ k ...
specific Embodiment approach 3
[0032] Embodiment 3: The difference between this embodiment and Embodiment 1 or 2 is that the dynamic model of an uncertain networked control system with random switching nonlinearity and bounded state time-delay established for Step 1 in Step 2 The specific process of designing the sliding surface is as follows:
[0033] The formula for the sliding surface:
[0034] the s k =Gx k -GAx k-1 (3)
[0035] where xk-1 is the state variable of the dynamic model of the networked control system at time k-1, s k is the sliding mode function at time k, and G is the parameter matrix of the sliding mode surface to be designed. In order to guarantee the non-singularity of GB and condition Choose G=B T P, P is a positive definite matrix to be solved.
[0036] Other steps and parameters are the same as those in Embodiment 1 or Embodiment 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com