IMU-based SLAM motion blur pose tracking algorithm
A tracking algorithm and motion blur technology, applied in computing, image data processing, instruments, etc., can solve the problems of camera positioning and tracking in lost and motion blur segments
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
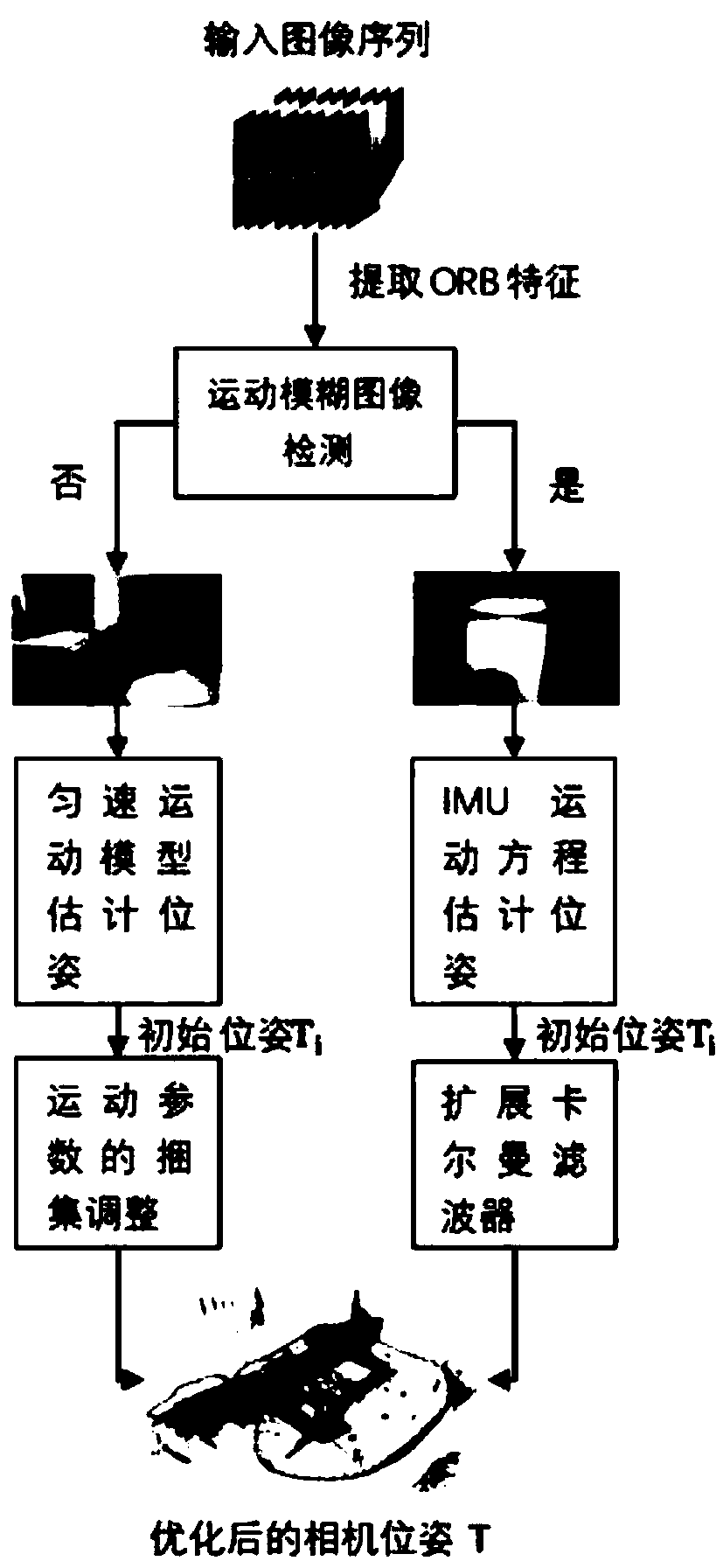
[0064] like figure 1 As shown, the present invention discloses an IMU-based SLAM motion blur pose tracking algorithm, which is improved based on the ORB-SLAM2 framework, and uses the measured values of the IMU to track the camera pose.
[0065] Specifically, it includes the following steps:
[0066] S1. Perform ORB feature extraction on the input image sequence, judge whether the image sequence belongs to a normal image or a motion-blurred image according to the number of extracted feature points, and choose one to perform step S2 or S3 according to the judgment result;
[0067] S2. If the judgment result is a normal image, use the uniform motion model to estimate the initial pose of the camera, and then perform bundle adjustment of the motion parameters;
[0068] S3. If the judgment result is a motion blur image, use the IMU motion equation to obtain the estimated pose, then use the extended Kalman filter to obtain the optimized pose, and finally combine the estimated pose...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com