Auxiliary output-based six-rotor unmanned aerial vehicle fault estimation method
A technology for fault estimation and auxiliary output, which is applied in calculation, design optimization/simulation, registration/instruction of vehicle operation, etc. It can solve problems that have not been widely studied, and achieve the effect of uniform distribution of drone body materials and quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0101] The present invention will be described in detail below in conjunction with the accompanying drawings.
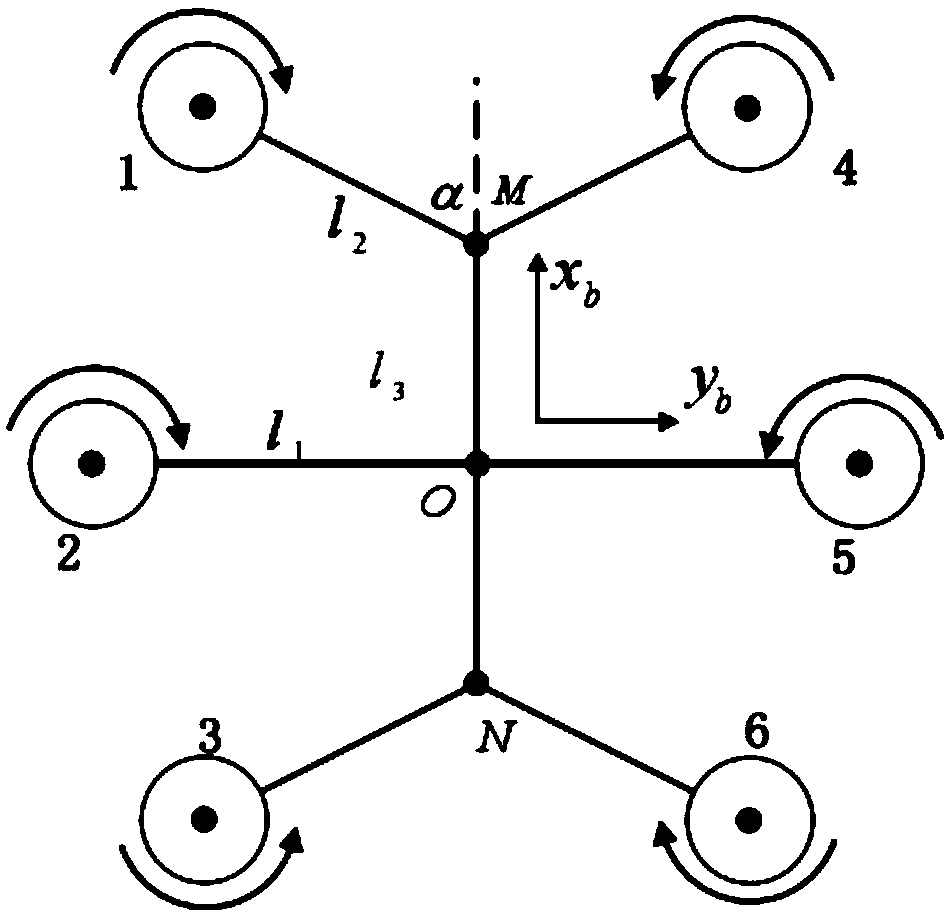
[0102] The present invention designs a fault estimation method based on the auxiliary output for the state space model of the six-rotor UAV where the actuator (motor, rotor) fails; first, establishes a dynamic model according to the structure of the six-rotor UAV, and then establishes The state space model of the hexacopter UAV; secondly, the residual lift provided by the hexacopter UAV actuator (motor, rotor) after the failure is used as the unknown input of the UAV system, and the six-rotor UAV with actuator failure is established. The state-space model of the man-machine system; then, according to the reality that the six-rotor UAV system does not meet the matching condition of the unknown input observer, the auxiliary output is constructed to break through the limitation of this condition, and the UAV state-space model is updated; then, for The updated UAV state-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com