Unmanned aerial vehicle monitoring system and monitoring method thereof
A monitoring system and unmanned aerial vehicle technology, applied in the parts of the TV system, image data processing, TV and other directions, can solve the problems of low altitude, lack of good defense, difficult to find and track unmanned aerial vehicles, etc., to improve the accuracy , the effect of reducing the cost of testing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
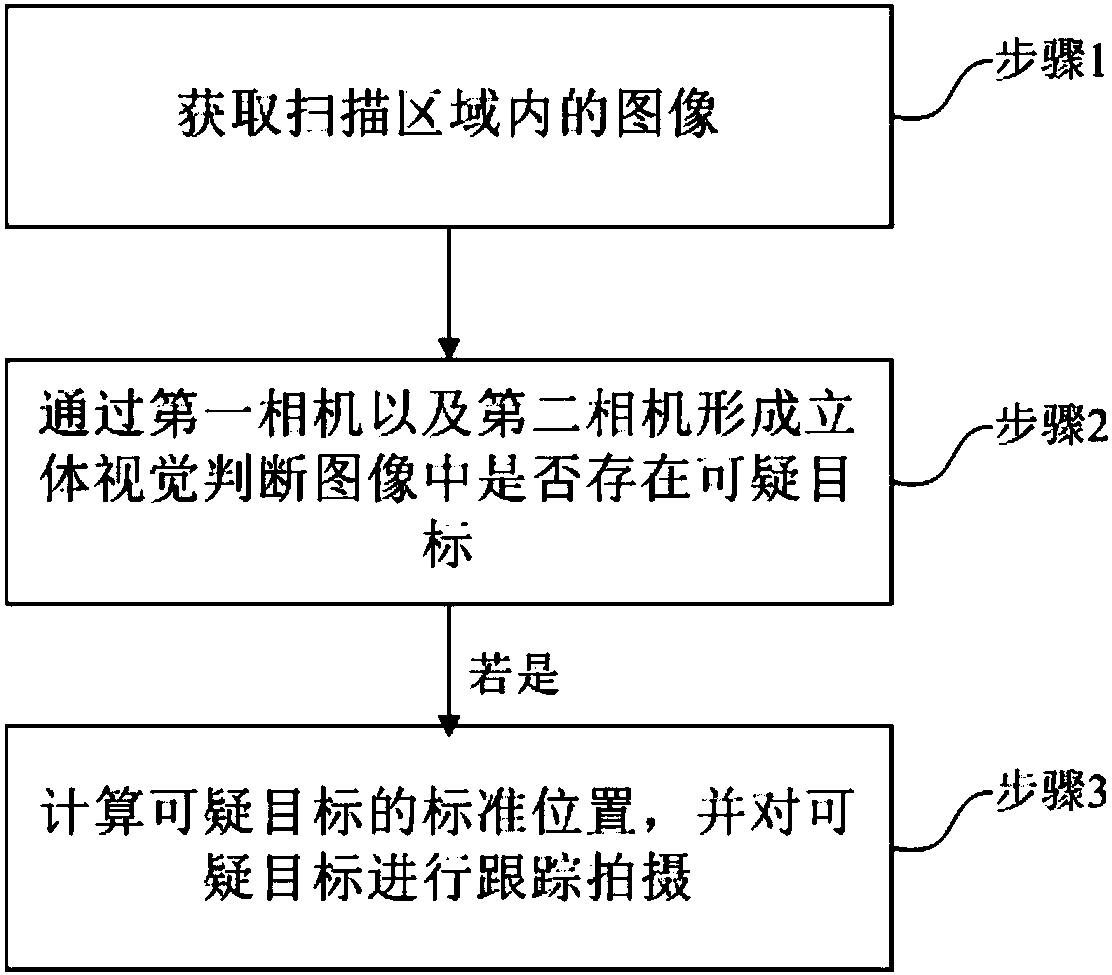
[0085] This embodiment provides a UAV monitoring method, the UAV monitoring method comprising:
[0086] Step 1, acquiring images in the scanning area;
[0087] Step 2, using the first camera and the second camera to form a stereoscopic vision to determine whether there is a suspicious target in the image;
[0088]Step 3, if yes, calculate the standard position of the suspicious object, and track and shoot the suspicious object. Among them, the suspicious target may be a drone.
[0089] like Figure 14 As shown, the embodiment of the present invention provides an array drone monitoring system based on the combination of infrared thermal imaging camera and visible spectrum camera and its algorithm. The servo pan / tilt can be referred to as the pan / tilt for short. The pan / tilt is usually installed outdoors. The middle of the image shown in the figure is the pan / tilt. The left side of the image shown in the picture is an infrared thermal imaging camera, and the right side of the...
Embodiment 2
[0111] On the basis of Embodiment 1, step 2 in this embodiment uses the first camera and the second camera to form a stereoscopic vision to determine whether the image contains suspicious objects, including:
[0112] The images include a first image acquired during a first time period and a second image acquired during a second time period;
[0113] Step 21: When within the first time period, calculate the first image, and judge whether there is a suspected target in the first image according to the settlement result;
[0114] Step 211: If yes, then use the first camera and the second camera to form stereoscopic vision to analyze and process the suspected target in the first image, and judge whether the suspected target is the suspicious target according to the analysis result; if yes, then Execute step 3;
[0115] Wherein, the first image acquired within the first time period includes:
[0116] Calculate the azimuth angle of the sun in real time, adjust the motion track of ...
Embodiment 3
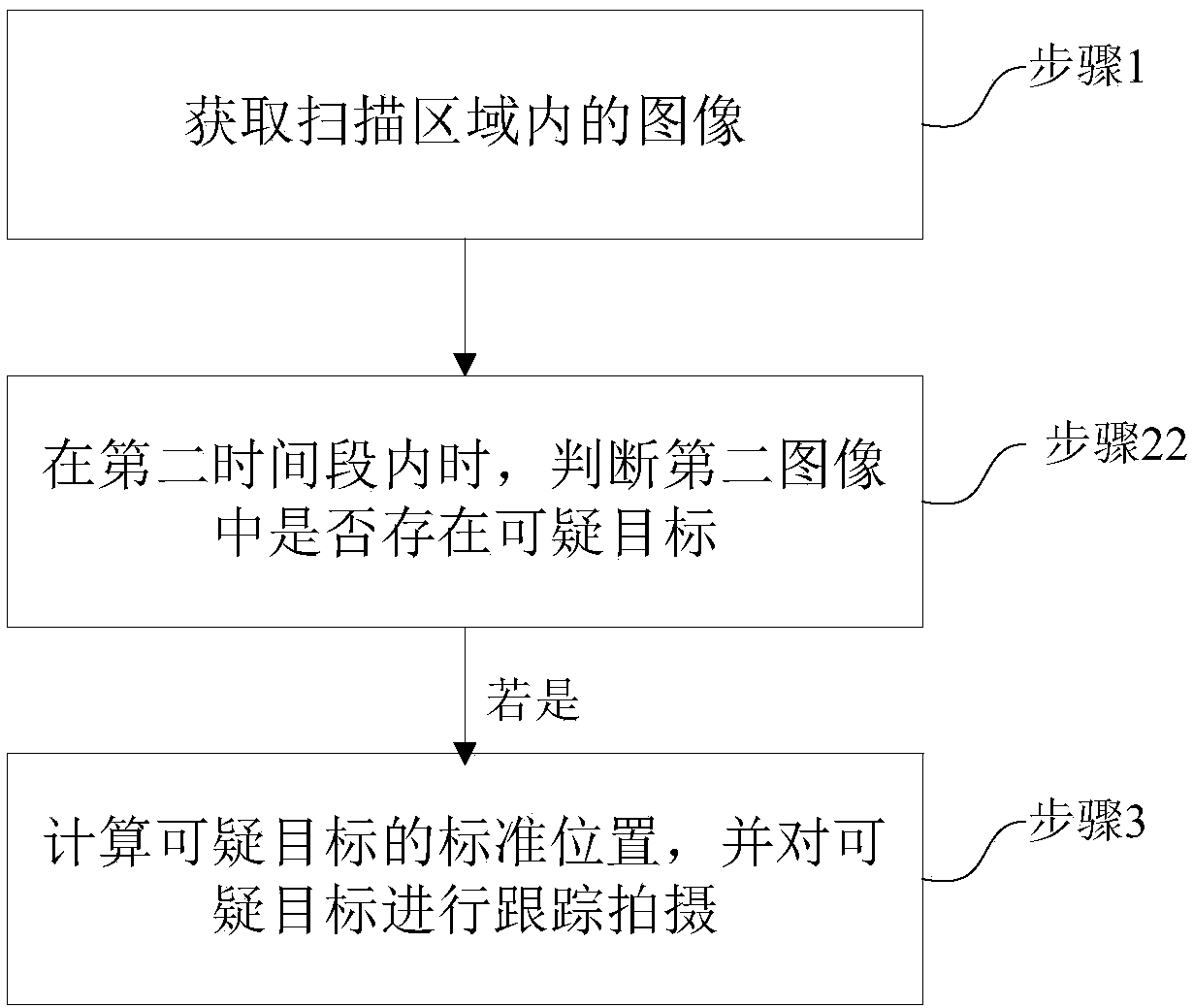
[0121] On the basis of Embodiment 2, step 2 in this embodiment uses the first camera and the second camera to form a stereoscopic vision to determine whether the image contains suspicious objects, and also includes:
[0122] Step 22: When within the second time period, determine whether the suspicious object exists in the second image; if yes, perform step 3.
[0123] Autonomous airspace scanning. The main working mode of the front-end equipment. The center will send the airspace range that the front-end device needs to scan and search, and convert it into the horizontal angle range and vertical angle range of the local gimbal, and the front-end device will automatically scan continuously within the specified range.
[0124] When working during the day, the infrared thermal imaging camera is mainly used, and the visible spectrum camera is used as a supplementary work. The azimuth of the sun will be calculated in real time, and the sun will be avoided during the scanning proce...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com