Negative-pressure contraction elastomer driven flexible knee-joint exoskeleton
A kind of knee joint and exoskeleton technology, which is applied in the direction of equipment to help people walk, passive exercise equipment, medical science, etc., can solve the problems of short working hours, inappropriate, inconvenient wearing, etc., to improve coordination and safety , Overcome the large inertia of the rigid mechanism, and improve the effect of safety and comfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be further described below in conjunction with the accompanying drawings and specific examples of implementation, but not as a limitation of the present invention.
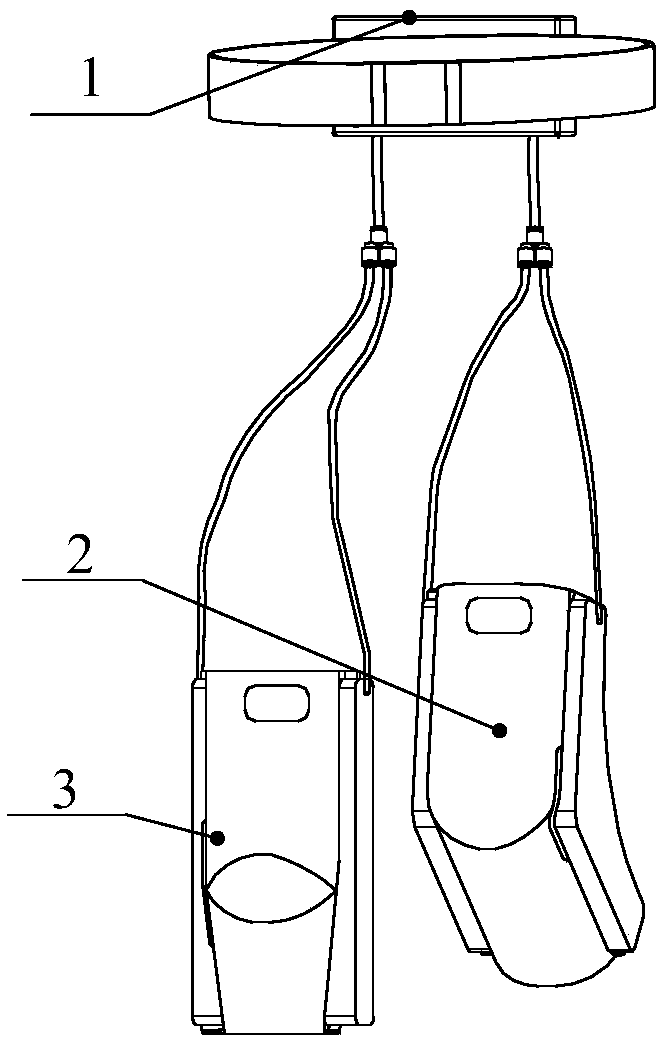
[0050] Such as figure 1 As shown, a flexible knee-joint exoskeleton driven by a negative-pressure elastic body is mainly composed of an exoskeleton controller 1 , a flexible actuator 2 for the knee joint of the left leg, and a flexible actuator 3 for the knee joint of the right leg. The exoskeleton controller 1 is the control and power output part of the flexible knee joint exoskeleton; the left leg knee joint flexible actuator 2 and the right leg knee joint flexible actuator are respectively worn on the left and right knee joints of the user. Flexible power-assisted actuators.
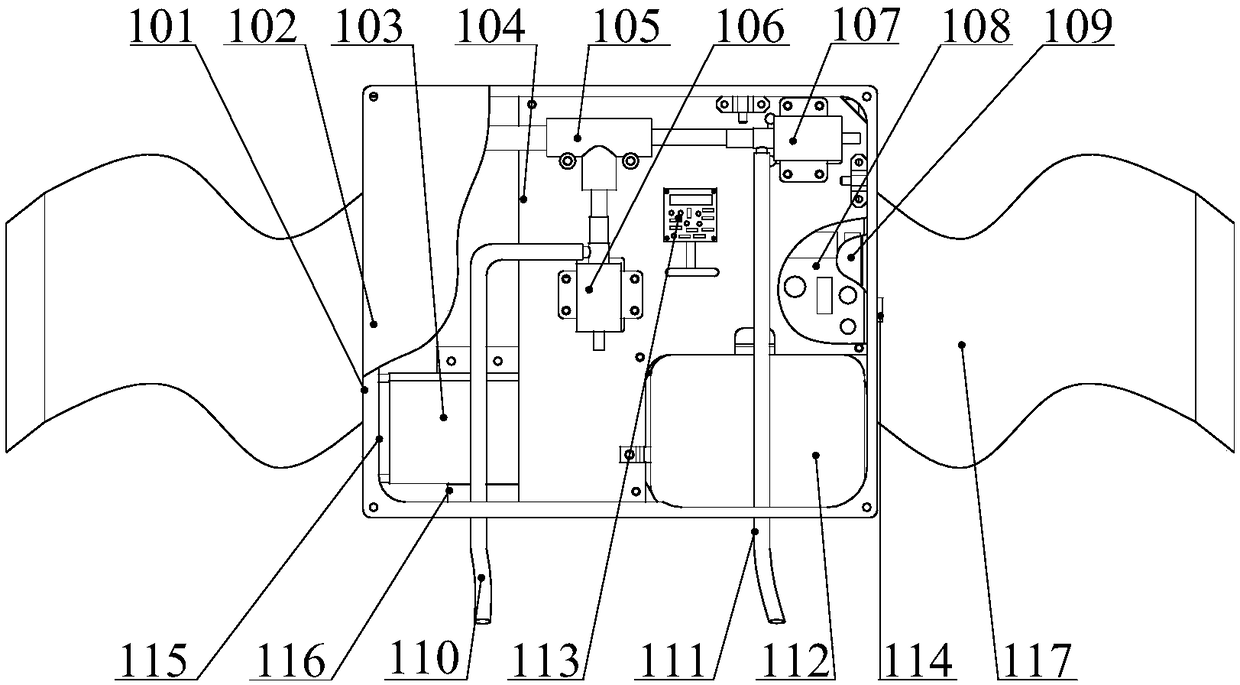
[0051] Such as figure 2 As shown, the exoskeleton controller 1 mainly includes a controller body 101, an end cover 102, a miniature vacuum negative pressure pump 103, a mounting plate 104, a T-shaped t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com