Industrial robot reliability calculating method based on fourth-moment estimation
A technology of industrial robots and calculation methods, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as low efficiency, limited calculation accuracy, and joint impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0081] The present invention will be described in further detail below in conjunction with accompanying drawing and specific embodiment
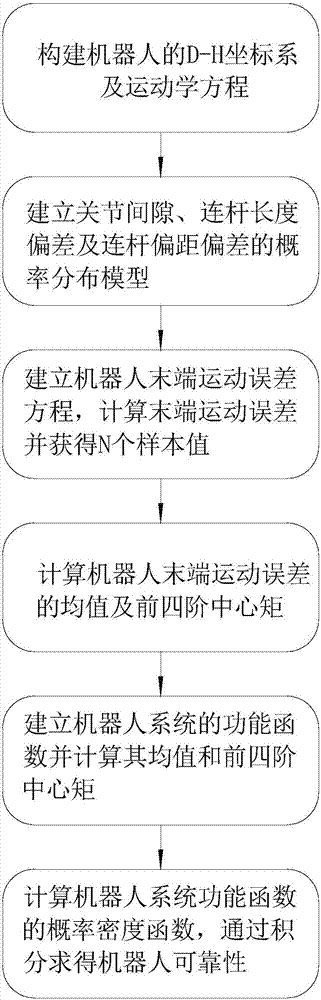
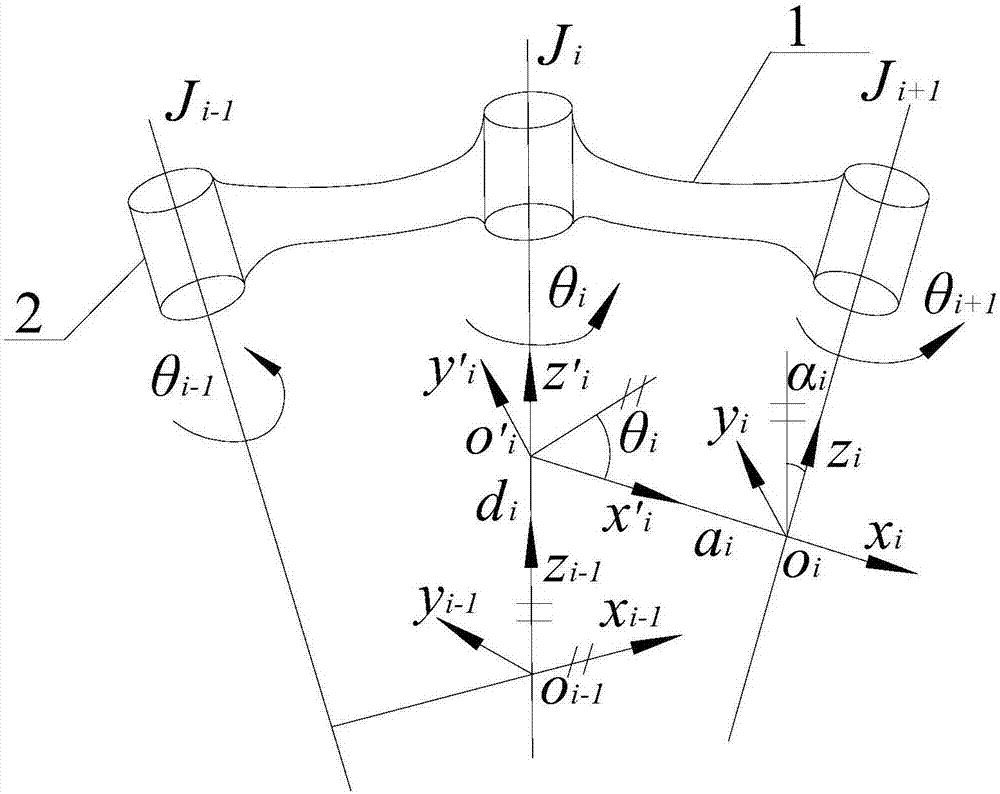
[0082] The basic principle of the present invention is mainly that: the joint clearance of the robot is a random variable that satisfies a uniform distribution, the deviation of the length of the connecting rod and the deviation of the offset distance of the connecting rod are random variables that satisfy a normal distribution, and the joint clearance will cause the joint rotation angle of the robot to have a Evenly distributed random errors within a certain range, the size deviation of the connecting rod will cause the physical parameters of the robot to change, the joint clearance, the deviation of the length of the connecting rod and the deviation of the connecting rod offset will cause the actual position of the end of the robot to deviate from its expected position through the kinematics of the robot , the distance between the actual po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com